
ARMATTANの3インチフレームで自作のドローンを作ってみました。
今回はその時の記録です。
ドローン関連のパーツ類のクーポンコード一覧です。クーポンコードコードをクリックするとコードがコピーされて、商品ページに移動します。そのまま貼り付けてご使用ください。
その他の割引クーポンは下の記事でまとめています↓
banggood(バングッド)ドローン送信機 FPVゴーグル クーポン 一覧
ARMATTAN 3インチフレーム「Tadpole」で自作ドローンを作成
パーツ構成
FPVカメラ
カメラ:RunCam Nano 2
家にあったカメラを使用。
ちなみにフレームに取り付けられるカメラ幅は14mm。
フレーム

フレーム:ARMATTAN 3インチフレーム「Tadpole」
ARMATTANの公式サイトで購入しました。
フレーム以外にもその他1万5000円くらい買い物をして、特に関税などもとられなく送料500円くらいでOKでした。
モーター

モーター:GEPRC 1206 4500KV
フレーム推奨モーターは 1106/5100kvなので、少し大きめですが、家にちょうどあったのでそれを使用することにしました。
ちなみにこのフレームのバッテリー推奨は「4S 450mAh」
※2020年の7月28日現在、GEPRC 1206 4500KVモーターが単体で売ってないか調べてみたのですが、なかったので「Racerstar」の同じサイズとkv値のリンクを貼っておきます。このサイズのモーターにしては価格が安いです↓
Racerstar 1206 4500KV
FC,ESC
FC,ESC:HGLRC FD413
価格:$39.99
フレームのネジ穴に合わせて「16mm×16mm」のFCとESCのセットを使用しました。
4sもOKなFCで今回で使用するのは2度目です。
以前に使用した時の記事はこちら↓

VTX
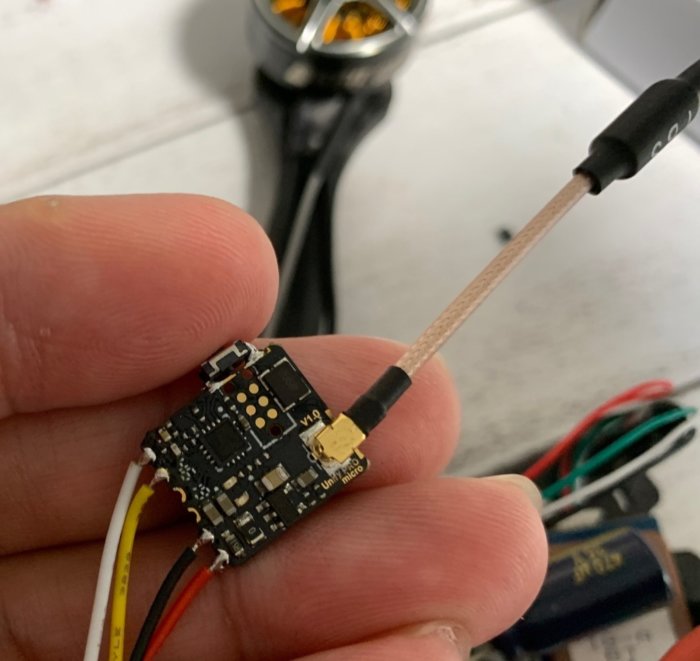
VTX:TBS Unify Pro32 Nano 5G8
はんだのピッチがせまいので、配線取り付けはシビアです。
TBS製品なので、たぶん高品質(TBS=良い。勝手に思ってます)。
以前に6sのドローンを自作した時もしようしたのですが、イイ感じのVYXだと思います。
かなり小さいので狭い場所にも取り付けられて、400mWとそこそ高出力できます。
レシーバー
レシーバー:Frsky XM+
価格:$13.99
ほんとうはフタバのレシーバーを取り付けたかったのですが、価格が高いので、安くてお気に入りの「Frsky XM+」にしました。
ARMATTAN 3インチフレーム「Tadpole」組み立て
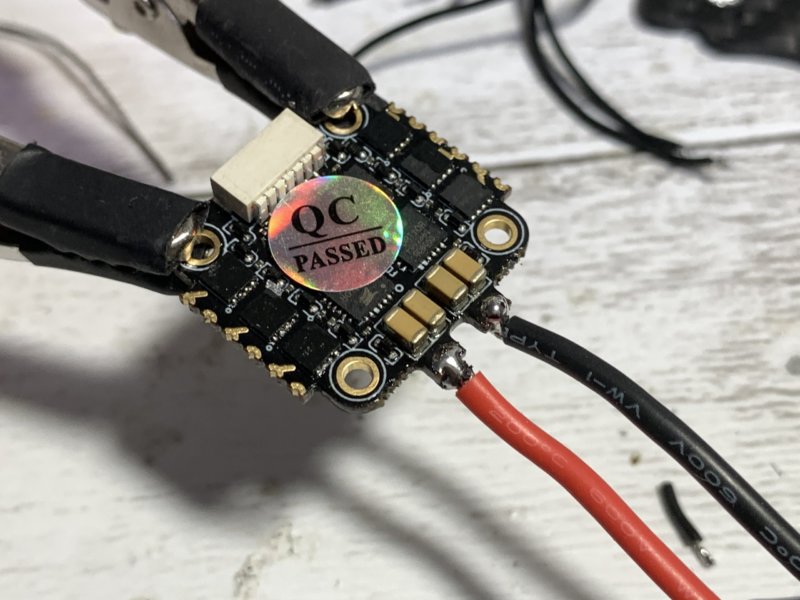
まずはESCに電源ケーブルをはんだつけ。
プラスとマイナスの記載があるので、赤→プラス 黒→マイナスでハンダつけ。
ちなみにこのFCを購入すると、ネジ類、タワーを作るためのゴムリング、コンデンサ、電源ケーブルがついてきます。
自分は最後の方でコンデンサの取り付けを行いました(理由はフレームが3インチだけど、小さい目なので、この時点では設置位置がイマイチイメージできなかった為)

次にモーターESCにモーターをはんだつけ。

下側のモーターはESCの裏側にはいせんを入れて設置しました。
次にFCを設置。
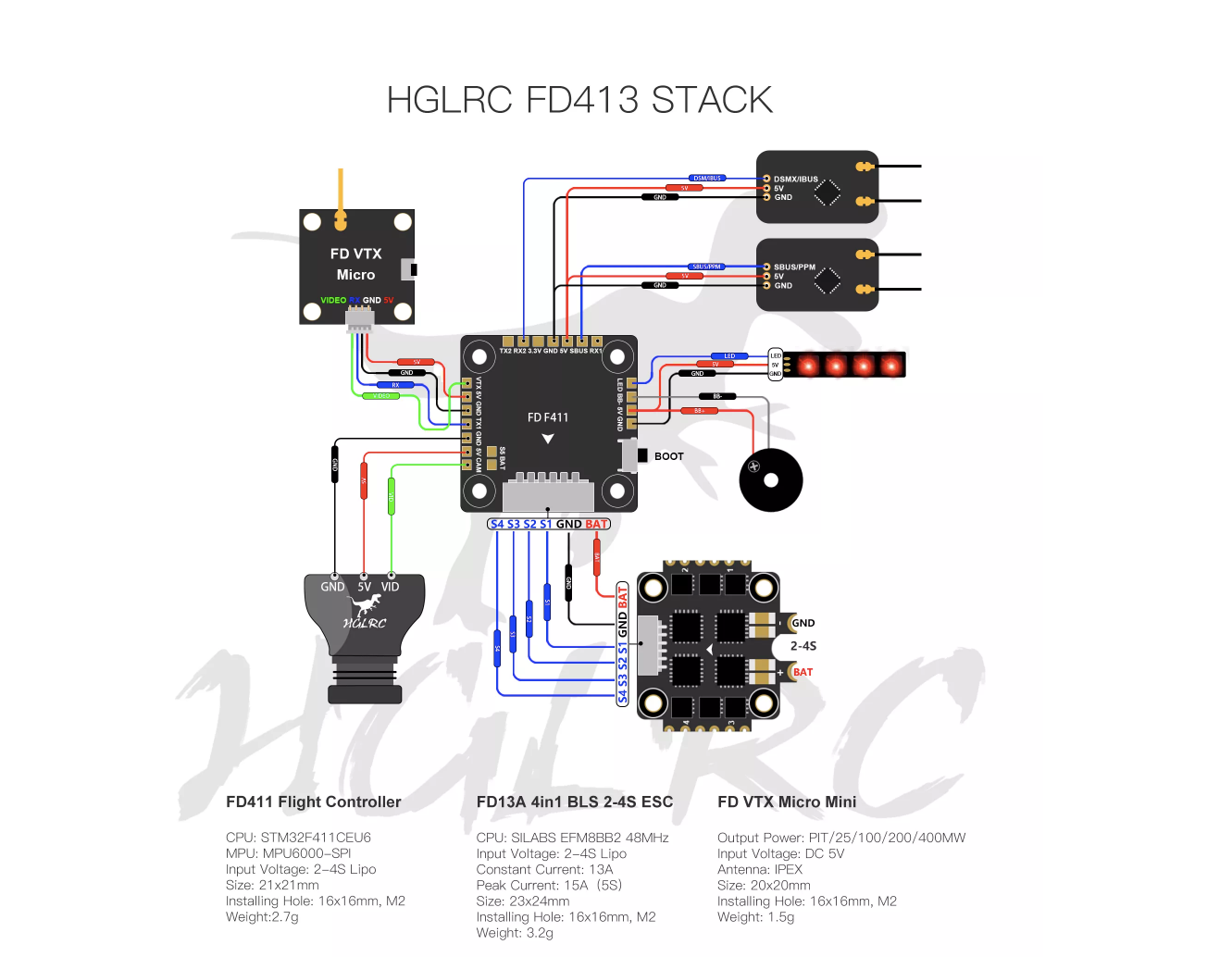
FCの回路図はこんな感じ。
これにそってパーツごとに取り付けていけばOKです。
ESCのハンダのピッチはせまくて、けっこうむずいですが、FCはそこそこ余裕があるので自分みたいなハンダが下手な人でもそこそこいけると思います。
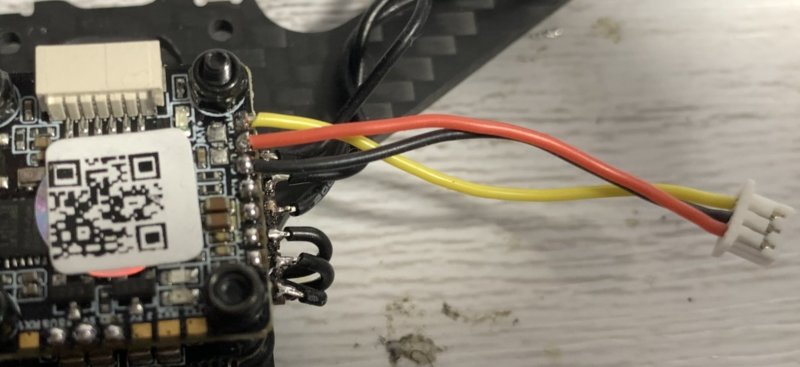
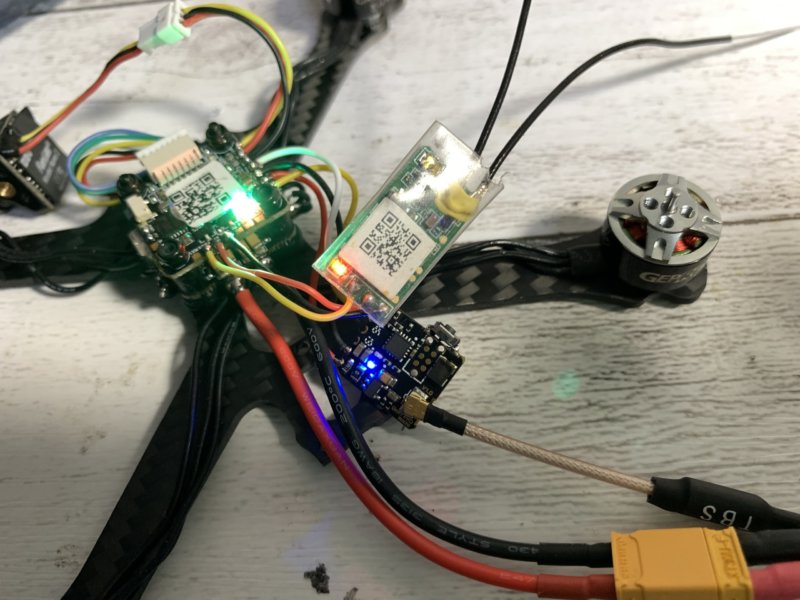
とりあえずカメラの配線のハンダつけ。
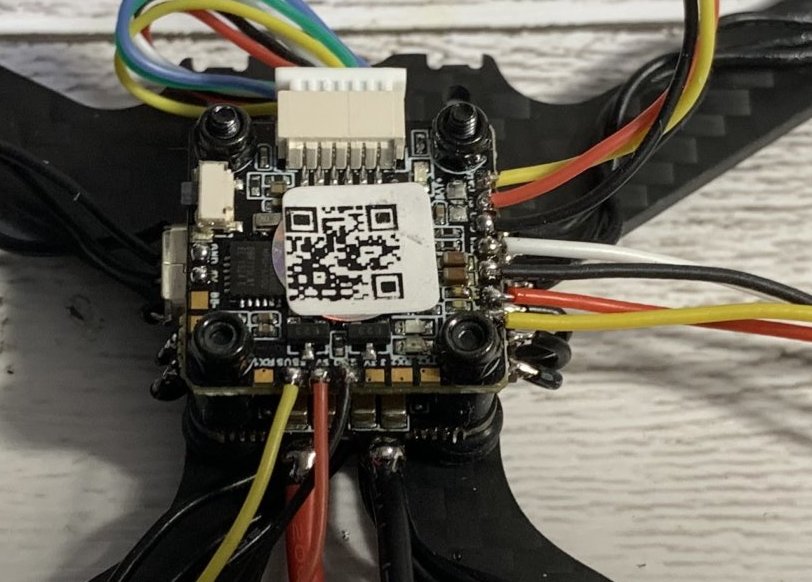
画像の右側の「白→スマートオーディオ、黒→アース、赤→電源、黄色→ビデオ」がVTXの配線で、
下側の「黄色→SBUS 赤→電源 黒→アース」がレシーバーの配線です。
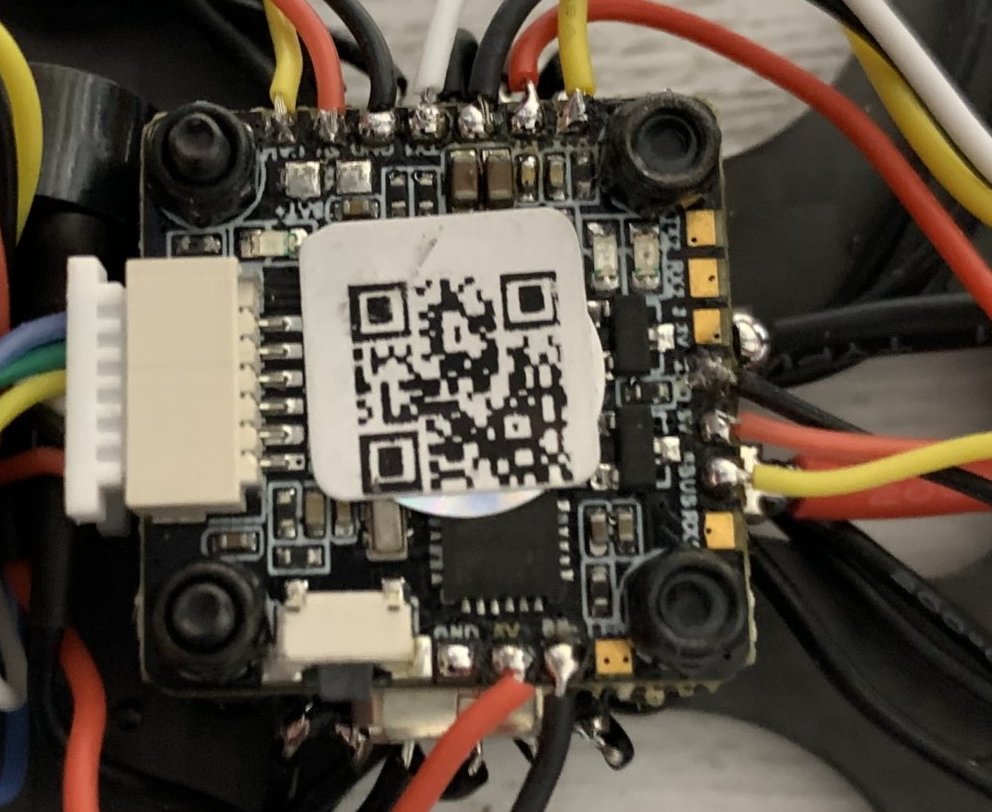
ちなみに上の画像の下側の配線はブザーです。
ロスト防止につけました。
ベータフライトの設定

簡単にベーターフライトの設定を紹介します。
とりあえず接続したところ、ベーターフライトのバージョンが「4.0.4」で少し古かったので最新のものにすることにしました(別にファームを古いものをでそのまま使用していても問題はありません)。
まずはファームアップデートしたあとにすぐに元の状態にもどせるようにバックアップをとっておきます。
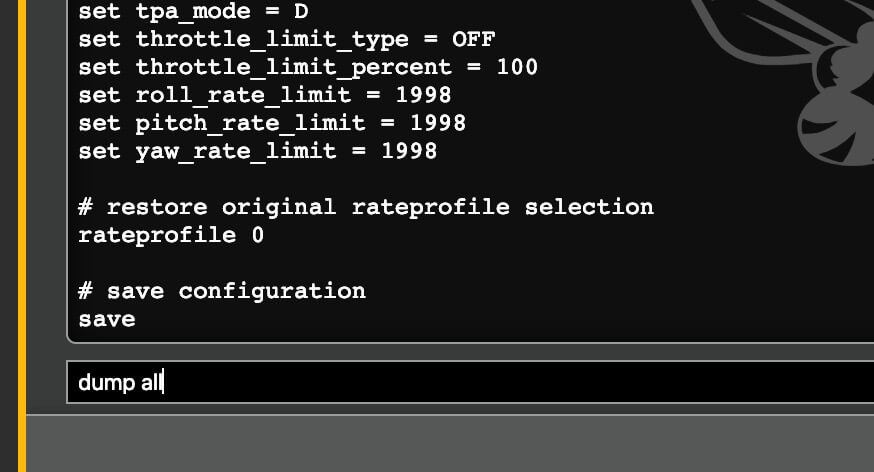
ベーターフライトに接続してCLIコマンドラインに「dump all」と打ち込みます。
ズラズラと英語が流れてくるので「# name」あたりから下をコピーして、メモ帳などにはりつけておきます。
テキストファイルで保存して、あとで読み込んでもOK。
自分はいつもメモ帳にコピペして、あとでCLIコマンドラインに貼り付けるやり方をしています。
メモ帳にコピペしたら、いちどベーターフライトを切断。
ファームウェアのアップデート
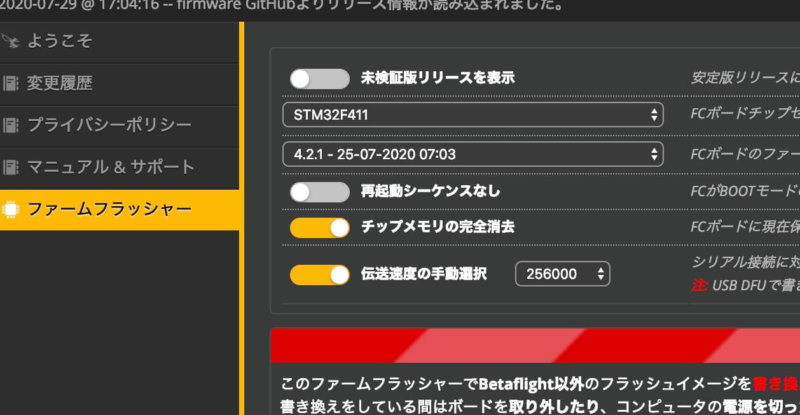
次にベータフライト コンフィグレーターのファームウェアのアップデートを選択。
このFCに内蔵されているベーターフライトの種類は「STM32F411 (S411) 」
種類を選択した後、ベータフライト の最新バージョンを確認したところ「4.1.2」だったのでそれを選択して、画面右下のファームをダウンロードを選択。
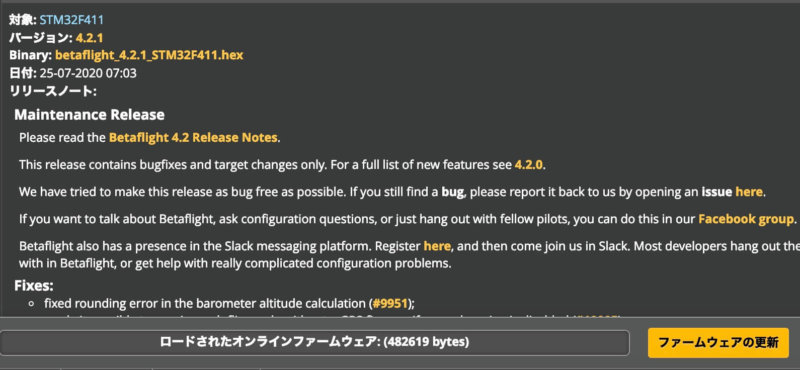
次に画面右下のファームウェアの更新を選択。
1回クリックすると「DFU」モードに移行。
2回目クリックするとファームウェアの書き換えが始まります。
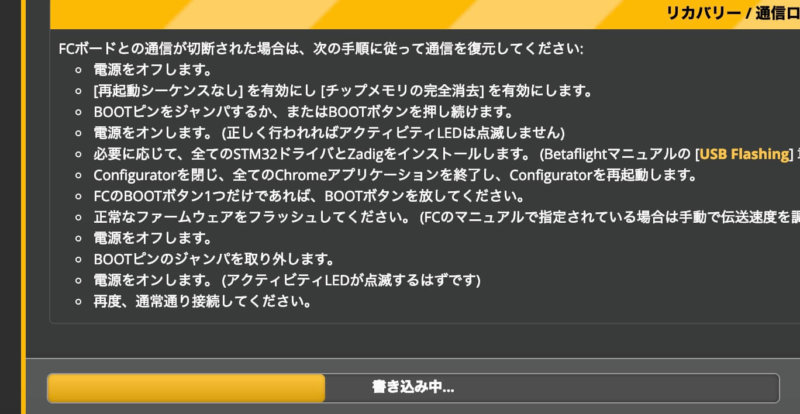
書き込み中は、じっと待ってください。
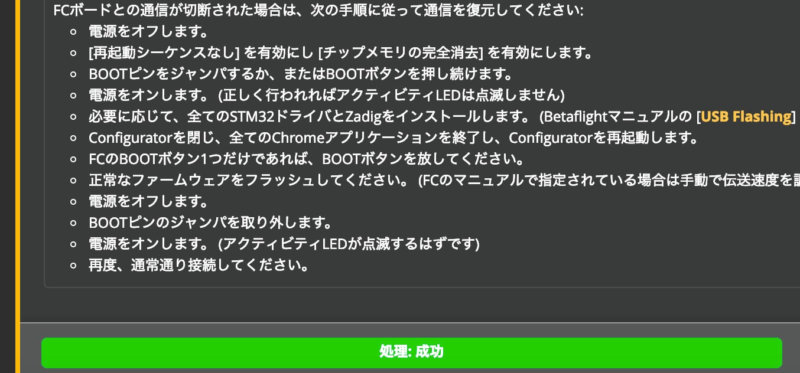
処理が完了するとこのような画面になります。
次にベータフライト に接続。
メモ帳にバックアップしていた英数時をそのまま貼り付けてあげます。
おそらくそのまま貼り付ければ、一番下は「save」になっているはず。
これで、ファームを上げる前の設定に戻すことができます。
ただ、ファームを上たことにより一部設定が戻らない項目が何箇所かあると思います(たぶん)
CLIコマンドラインに貼り付けた時、赤字で何箇所かエラーがでるはず。
映像伝送送信機(VTXテーブル)

ベータフライト のバージョンが「4.1」以上の場合はVTXテーブルの設定が必要です。
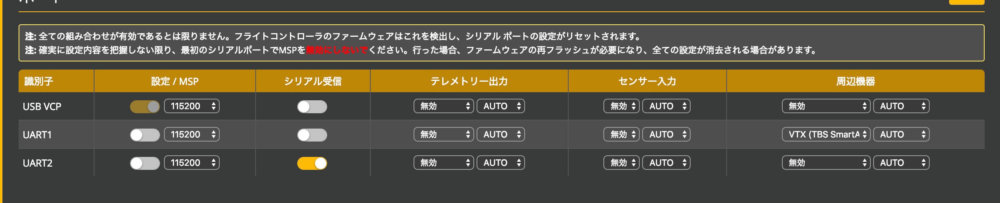
この記事で使用しているFCの場合、ポート1を、
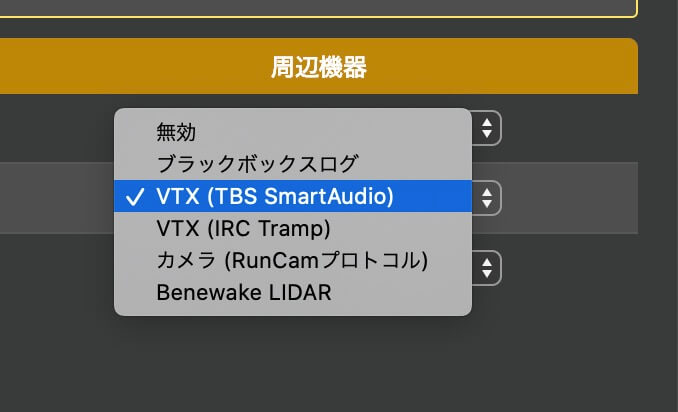
スマートオーディオ に変更してあげます(VTXがこの記事で使用しているTBSの場合)
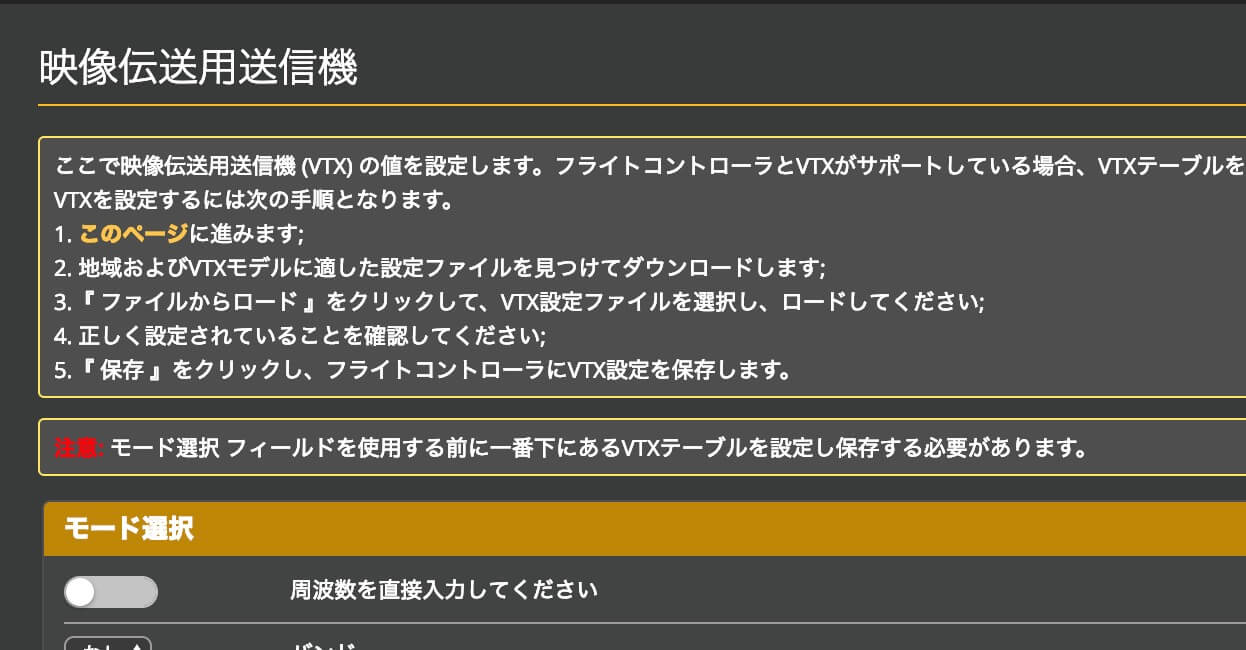
映像伝送送信機タブの画面の「このページ」をクリックするとVTXテーブルダウンロードの画面に移行します。
USA2.0をダウンロードしてあげて、そのファイルを読みこんであげる必要があります。
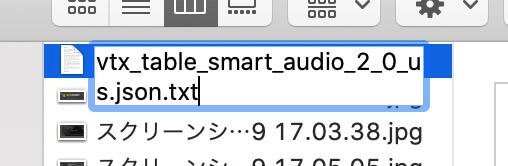
Macでダウンロードしたところ、自分の場合テキストファイルになってしまいました。
jsonファイルに変更してあげればファイルの読み込みができます。
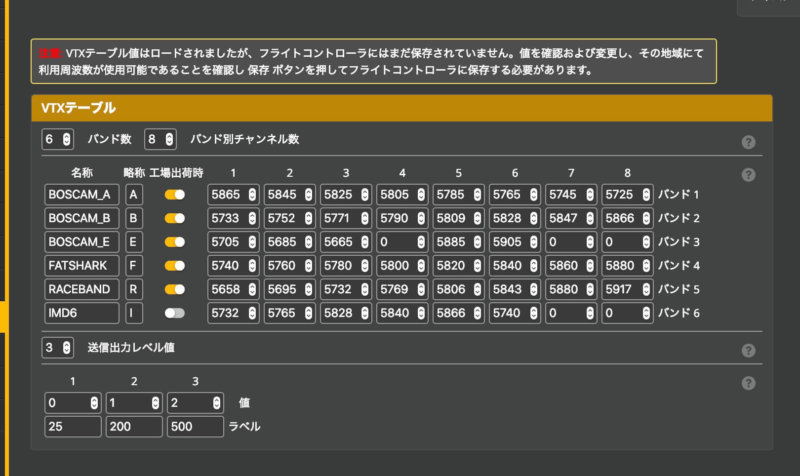
ファイルを読み込むとVTXテーブルが上の図のように入ります。
出力がTBS nano のやつとちょっと違うので変更してあげる必要があります。
下の英数字はTBS nanoのVTXテーブルです。
出力も変更して入力してあるので、上で紹介した流れをやるのが面倒な人は下の英数字をコピーしてCLIコマンドラインに貼り付けてあげれば、テーブルが入るようになっています。
vtxtable bands 6
vtxtable channels 8
vtxtable band 1 BOSCAM_A A FACTORY 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B FACTORY 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E FACTORY 5705 5685 5665 0 5885 5905 0 0
vtxtable band 4 FATSHARK F FACTORY 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R FACTORY 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable band 6 IMD6 I CUSTOM 5732 5765 5828 5840 5866 5740 0 0
vtxtable powerlevels 3
vtxtable powervalues 0 1 2
vtxtable powerlabels 25 100 400
save
それと最後にVTXの周波数を日本で使用していい周波数に変えてあげるといいです。

映像送信機タブのところで手動で周波数が変えられるので「E-1」や「F-1」あたりに変えてあげましょう。
一応、自作ドローンをつくっている最中でも、日本で使用していい周波数以外は飛ばさない方がいいと思うので。
モードタブ
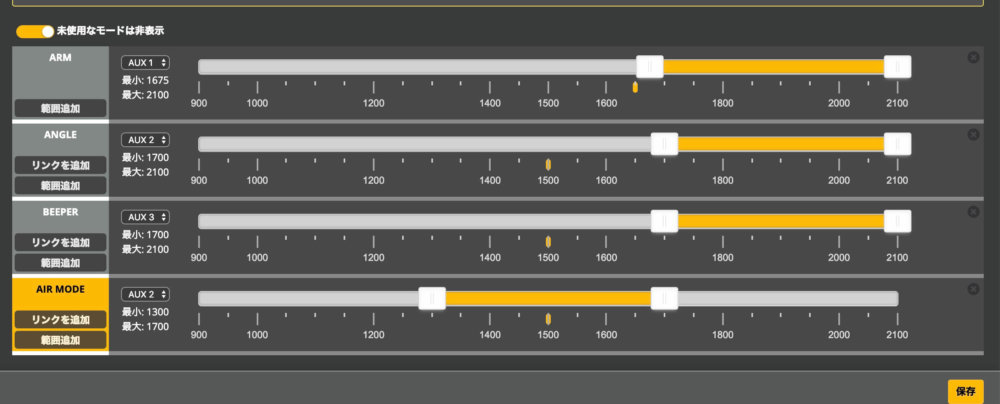
モードタブはこんな感じで設定。
これはお好みで!
モーターの回転方向のチェック
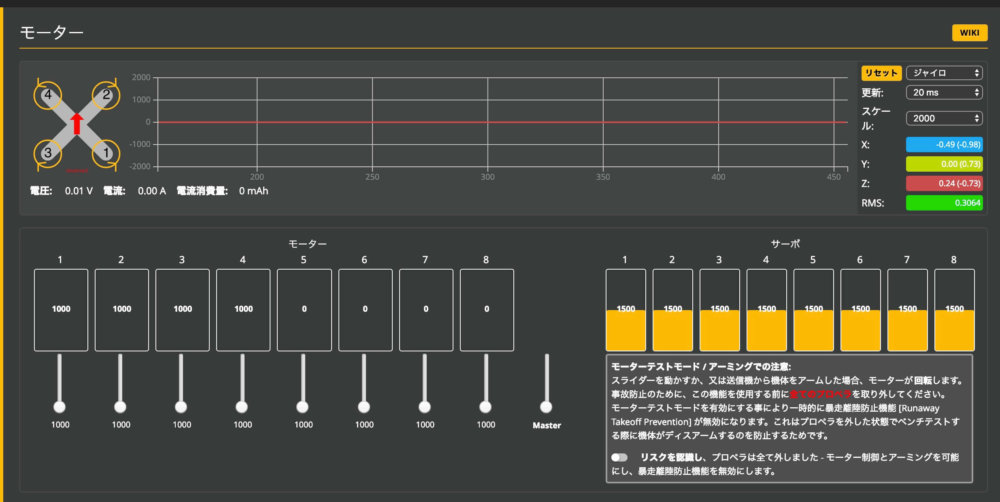
モーターが上の図と同じ回転方向になっっているかチェックします。
自作ドローンを作るとだいたい2個は逆回転なので、回転方向を変更してあげる必要があります。
モーターの回転方向は、モーターの3本ある配線の外側の配線を逆にする、またはBLHeli を使ってモーターを逆回転にする方法があります。
自分はBLHeliを使ってモーターの回転方向を変えることがほとんどですが、まれにBLHeliに接続できない場合があります。
そんな時は、モーターの配線をハンダをやりなおして逆回転にしています。
BLHeliを使ってモーターを逆回転にする方法は下の記事で紹介しています↓
動作の確認
とりあえずベータフライト のかんたんな設定が終わったら、送信機とレシーバーをバインドしてあげます(順番は自分の自己流です)。
レシーバーのバインドは「Frsky XM+」なので、レシーバーのバインドボタンを押しながらバッテリーを差し込んで、赤色LED点灯が確認できたら、送信機側からバインド。
赤のLEDが点滅したら、バインドOKのサインです。
一度、バッテリーを抜いて、再度バッテリーを差し込むと今度は緑色の点灯にかわります(送信機の電源も入っている必要があります)
よくありがちなのが、送信機とレシーバーの位置が近すぎて、赤の点灯から変わらないという現象です。
近くても緑色のバインド状態になるのがほとんどですが、たまにバインド状態ならない時もあるので、そんな時は送信機を離してあげてください。

あとはこの状態でカメラの映像が、FPVゴーグルに飛んでくるかチェックしたり、スマートオーディオ を使って周波数の変更ができるかなどチェックします。
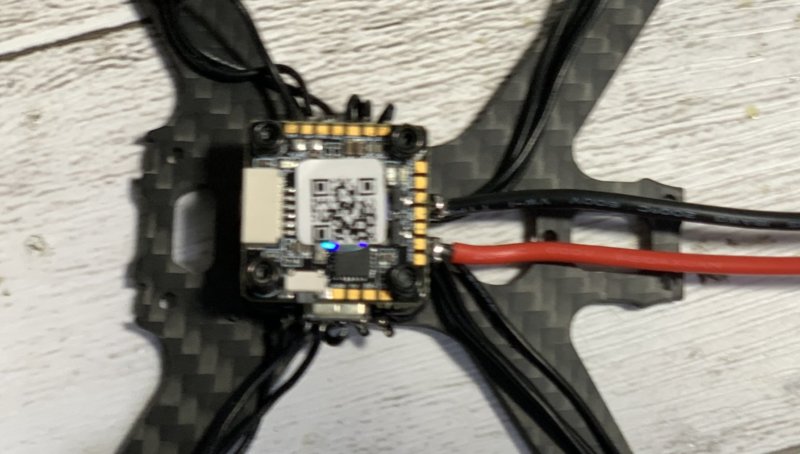
この状態で特に問題ないようだったら、ドローンを組んで形にしていきます。

最終的にはこのように組んで終了(プロペラついていないですけど)
ベータフライトに接続
最終的に再度ベータフライト に接続してOSDの設定や、RSSIの設定などなど、していきます。
ちょっと長文になりすぎて、疲れてきたのでこの辺で終わりにします。
あとで追記するかもしれないです。
重量

ちなみに重量は87gで、
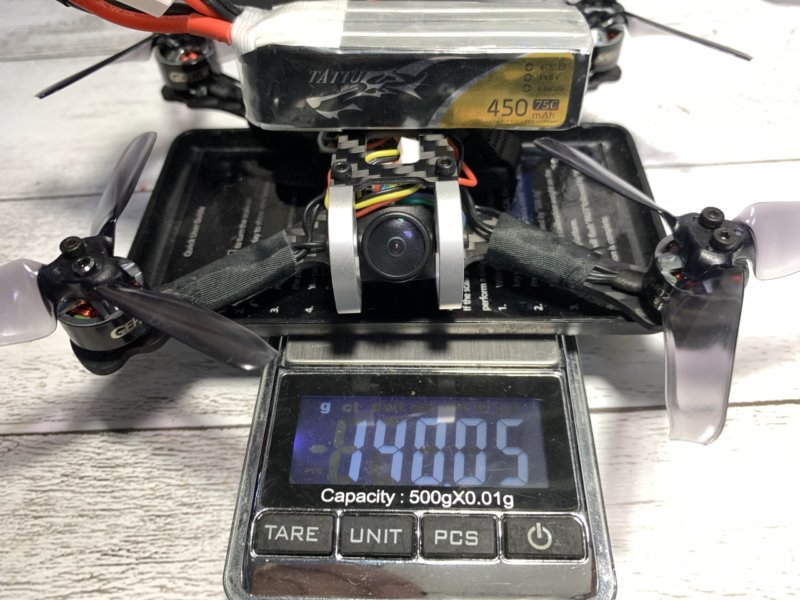
tattuの4s450mahバッテリー込みでも140gくらいでした。
自作ドローン ARMATTAN 3インチ テストフライト
室内でホバリングテストしたときにも感じたのですが、このFCのデフォルトのPIDだとスロットルを入れるとブルブル状態になってしまったので、以下の値にPIDの調整を行いました。
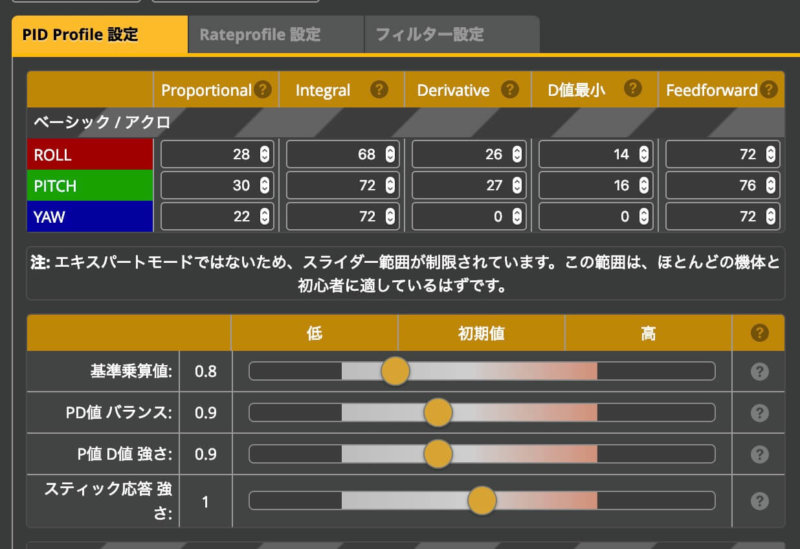
PIDをこの値に変更したところスロットルを入れてもブルブルがなくなりいい感じになりました。
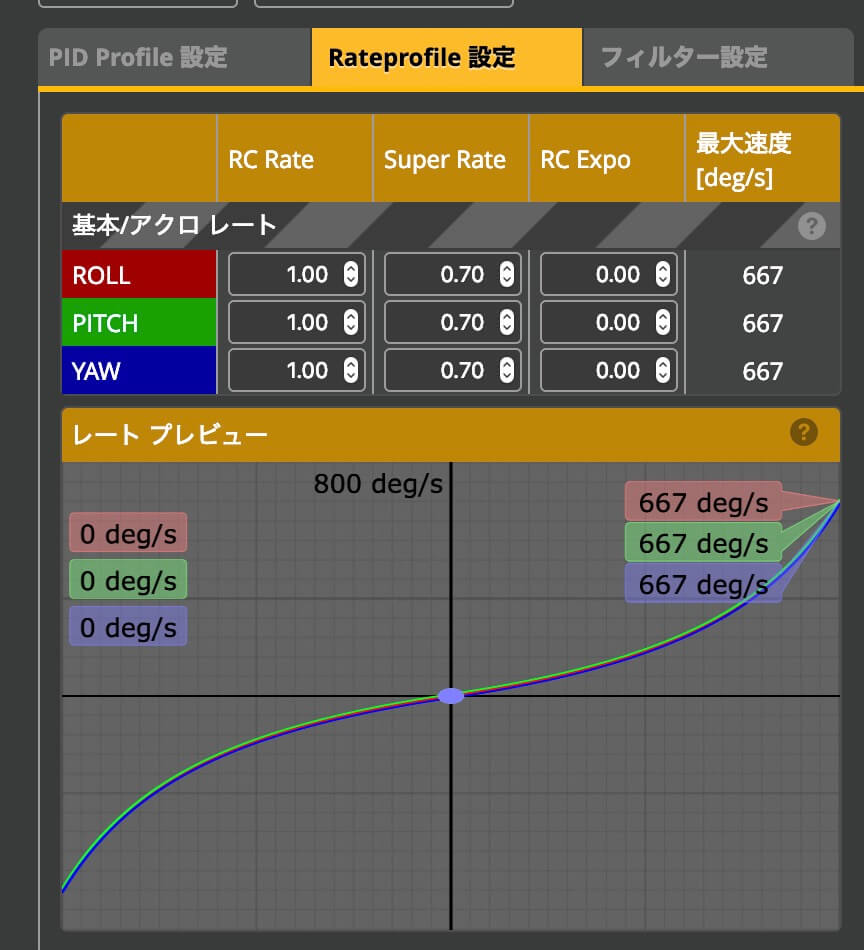
RATEはそのままの値で。
実際に飛ばしている映像はこちら↓
最後に

重量200g以下で余裕でおさまるし、パンチのある飛びをしてくれるのでお気に入りの一台になりました。
ちなみにYouTubeにアップしている動画はinsta360Goで撮影しています↓




