
今まで3インチや5インチのドローンは自作してきましたが、手のひらサイズのダクト付きのマイクロドローンは自作したことがなかったので、パーツを選んで組み立ててみることにしました。
今回は75サイズの自作ドローンを作り方を紹介します。
まぁ作り方の紹介というか、自分が作った記録的な感じにはなりますが....
マイクロドローンを自作してみたい!って人の参考になるところが、ちょっとでもあれば幸いです。
関連記事
自作ドローンの作り方は下の記事でまとめています↓↓
>>自作ドローンの作り方!初心者に向けに解説
自作マイクロドローン 工具等
まず初めに今回自作のマイクロドローンを作るにあたり、使った工具や道具的なものを紹介します。
白光 FX600A はんだこて
はんだこてはこちらを使用しました。
温度が上がるのが早く、電源を入れればすぐに使えます。
そして使いやすいし、なかなか壊れない!
少し値段は高いですがおすすめです。

安いものをお探しの方はこちらのセットもなかなかおすすめ。いろいろ必要なものがついてきて安い。
ちなみにハンダは20回くらい使用したら壊れましたw
ヒートガン
収縮チューブを温める時に使いました。

熱収縮チューブ透明タイプ
レシーバーの保護のために使いました。
レシーバーを包んだ後、ヒートガンで温めれば収縮してぴったり包み込むことができます。

ワイヤーストリッパー
ブザーの配線やレシーバーの配線の皮を剥くのに使いました。
かなり綺麗に剥けます。
なくても指でちぎったり、ニッパーなどを使っても大丈夫。
あると便利な工具です。

あった方がいい道具

精密基盤固定ツール
かなり使いやすくておすすめ。

ブザーなどを取り付ける配線。

ブザー。
自作マイクロドローン パーツ選び
2025/09/03 更新
本記事は2020年のビルド記録をベースに、いま買える現行パーツへ差し替えた最新版です。写真や作業例は一部が旧モデルの参考イメージです。
紹介している最新パーツは65mmサイズの20g程度の重量の1sドローン用のパーツです。
ここからが本題です。まずはパーツを選んだ基準についてかんたんに紹介。
とりあえず「どんなマイクロドローンを作りたいか」を考え、
・HD画質で空撮できる
・広めの公園で飛ばせる(イメージ)
以上、2点が今回マイクロドローンを作るにあたり考えたところです(かなり浅い考え)。
別に上の2点をみたすマイクロドローンなんてたくさんあるので、完成品(BNF)を買っちゃえば、事足りるのですが、、、、、
とりあえず自作ドローンの作り方のお勉強ですw
なんとなくマイクロドローンで良いイメージがあるメーカーというと自分は「BetaFPV」だったので、パーツはカメラとレシーバーいがいBetaFPVで揃えました。
ベースは完成版の「Beta75HD」を基本にパーツを揃えています。
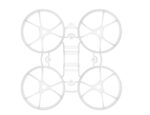
自作マイクロドローン:フレーム

フレームは75サイズのブラックを購入。
価格は「$4.99」
現行のおすすめ品(65mmマイクロドローンビルド想定)↓
自作マイクロドローン:FC ESC

FC,ESCは「F4 2-4S AIO Brushless Flight Controller 12A V2 (BLHeli_S)」を購入。
価格は「$39.99」
FCにモーターを簡単に取り付けられるコネクタ付き、バッテリー電源ケーブルもついているので、ハンダつけをする回数が少なくてすむFCです。初心者の方でも楽々。
現行のおすすめ品(65mmマイクロドローンビルド想定)↓VTXとレシーバー(ELRS)も内蔵されています。
自作マイクロドローン:モーター

モーターは「1103 Brushless Motors 8000kv値 3s対応」のものを購入。
4個セットで「$39.99」
モーターの配線にコネクタ付きですので、ハンダなしでFCにかんたんに取り付けすることが可能です。
現行のおすすめ品(65mmマイクロドローンビルド想定)↓

自作マイクロドローン:VTX

VTXは「A01 25-200mW 5.8G VTX」を購入。
価格は「$14.99」
現行のFCはVTXも内蔵されています

VTXの系統図は戸澤さんのところにあります↓↓

自作マイクロドローン:キャノピー

キャノピーは75サイズに合うものを購入。
「V3 Black」
価格は「$6.99」
たぶん完成版のBeta75HDのキャノピーは「V2」がついているのだと思います。
V3は「TWIG XL」「 X-Knight 4」「Beta95X」など。に使われてるキャノピーっぽいです。
なんでV3にしたかというと、黒のキャノピーにしたかったから。
ただそれだけの理由です。
少し形状が違うようですが、特にもんだいありませんでした。
BetaFPVのVTXA01ならサイズがぴったり簡単に取り付け可能!
現行のおすすめ品(65mmマイクロドローンビルド想定)↓Air Canopy

自作マイクロドローン:カメラ

カメラは家にあった「RunCam Split 3 Nano whoop」にしました。
ネジの位置がwoop用で少し広いため、黒のV3キャノピーのネジ位置とぴったりフィットしました。
ちなみにカメラの幅は14mmと狭いのですが、カメラについてくる付属のマウントを利用すれば19mmに変更できるため黒のV3キャノピーでもぴったり合います。
Hole Distance of Installation: 25.5*25.5mm
Dimensions: PCB 29*29mm / Lens Module 14*14mm
現行のおすすめ品(65mmマイクロドローンビルド想定)↓

自作マイクロドローン:レシーバー
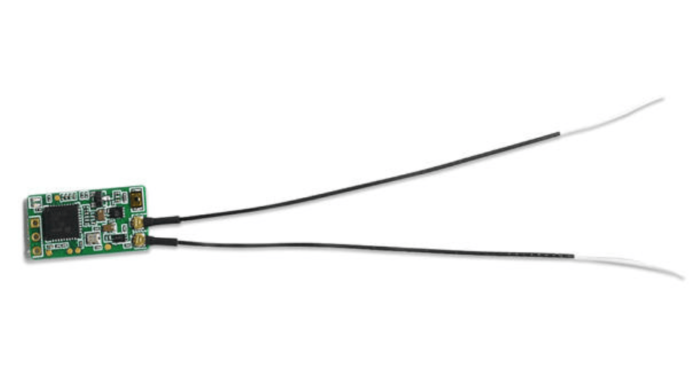
レシーバーは「Frsky XM+」にしました。
選んだ理由は家にあったからw
本来なら最近FUTABAのプロポを使いはじめているため、レシーバーはR2000SBMあたりにしたかったのですが、価格が高いためわざわざ購入するのはやめておきました。
「Frsky XM+」ならFUTABAの「R2000SBM」の半額以下で購入できます。
現行のFCはELRSレシーバー内蔵↓

自作マイクロドローン 組み立て
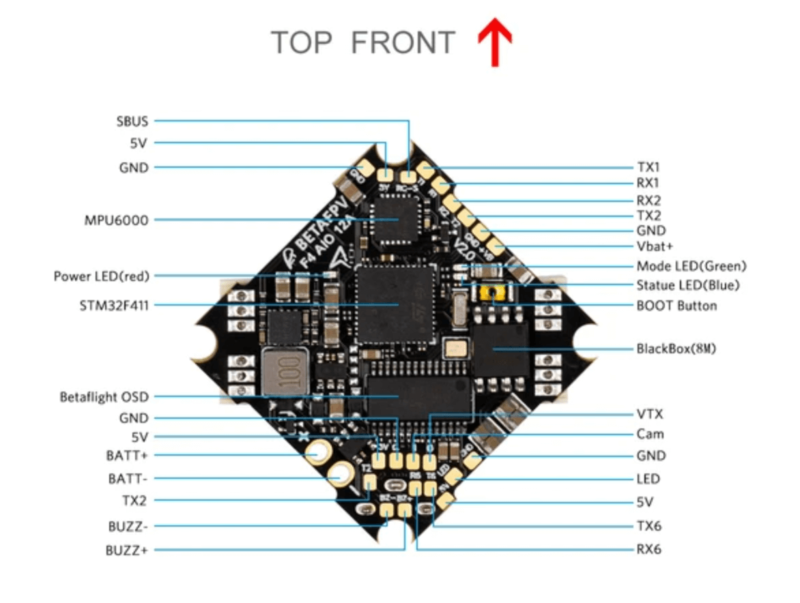
それでは上のFCの回路図をもとにパーツを組み立てていきます。
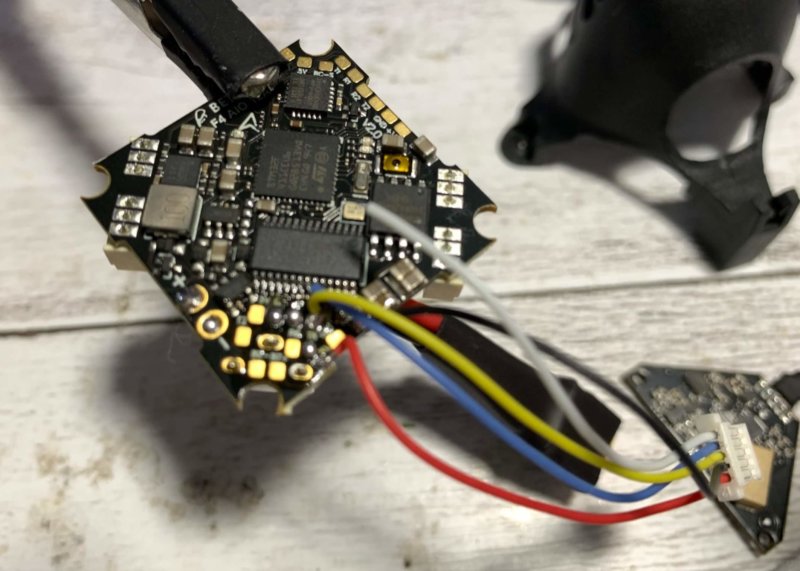
まずはVTXの配線とカメラを取り付け、カメラに映った映像がVTXをつかってモニター映るかチェックを行いました。
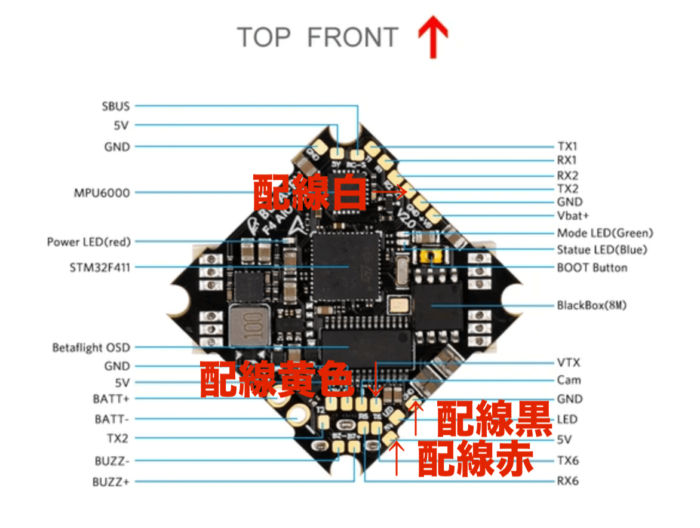
黄色の配線は「回路図→VTX」
黒の配線はアースですので「回路図→GNB」
赤の配線は電源ですので「回路図→5V」
白の配線はスマートオーディオですので「回路図→T2」
で取り付けています。
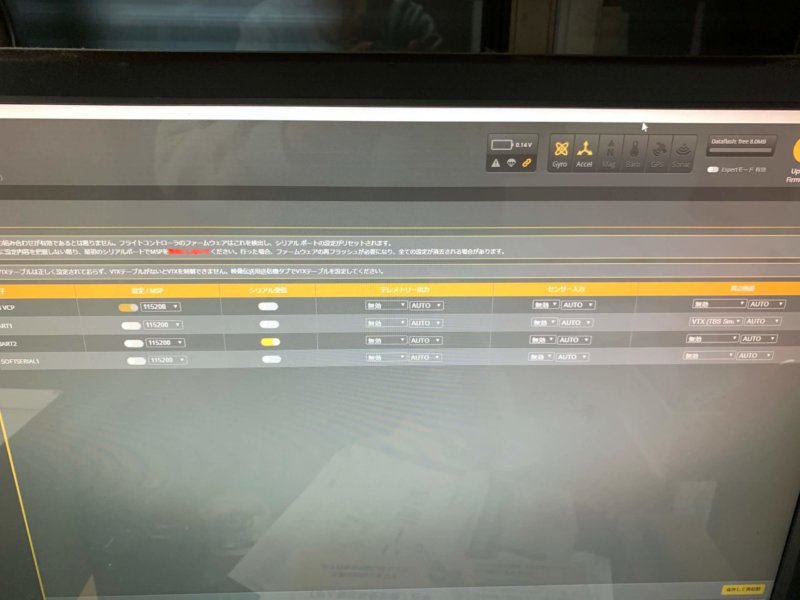
ちなみにデフォルトのポートの設定では「UART1」がスマートオーディオ。
「UART2」がレシーバーでシリアル受信がONに設定されていました。
うまく、レシーバーが機能しなかった為、「UART2」 をスマートオーディオ。
「UART1」をレシーバーでシリアル受信がONに変更しています。
この変更により、白の配線をT2に接続しています。
もしかすると普通にデフォルトの設定でもうまく動作するのかもしれません。
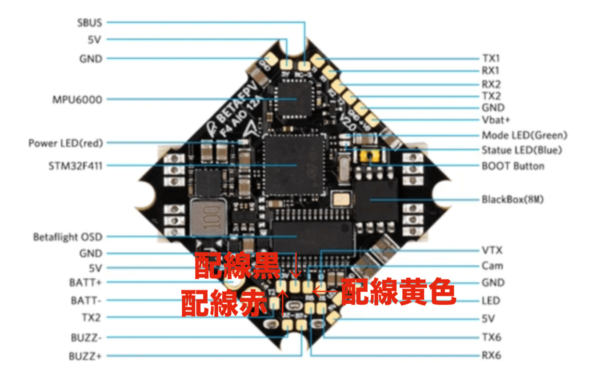
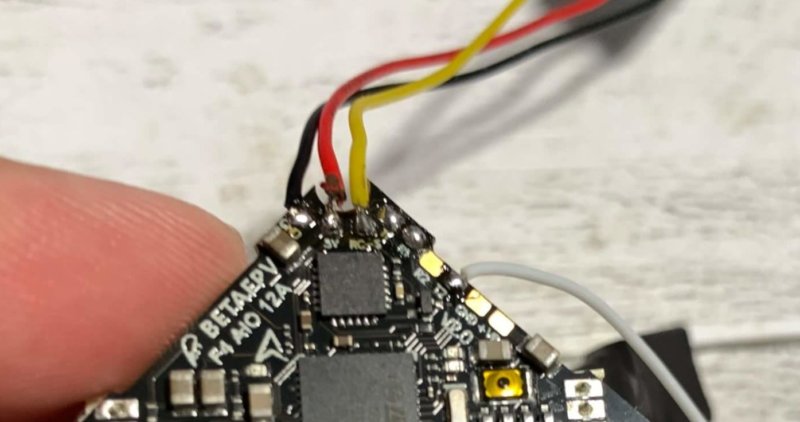
カメラ側に接続する配線は上の画像の矢印の部分からとりました。
黄色の配線カメラの映像で「回路図→CAM」
黒の配線はアースで「回路図→GNB」
赤の配線は電源で「回路図→5V」
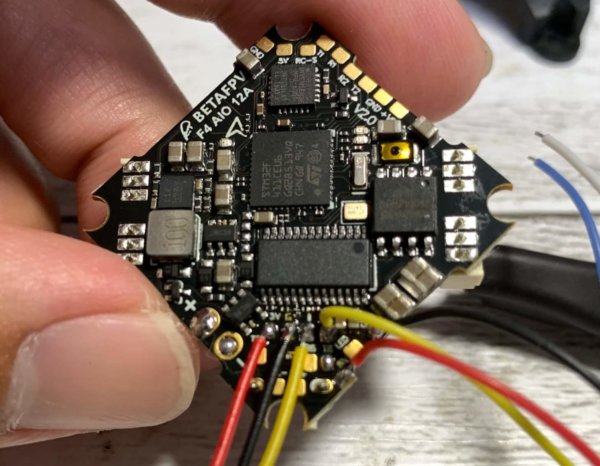
ちょっとわかりにくいですがこんな感じです。
カメラの基盤側には基盤に「5v」「GNB」「cam」などの記載があるのでそれとハンダで接続すればOKです。
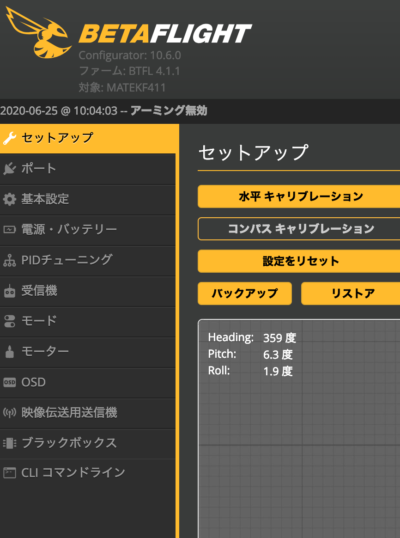
そのあとFCとベータフライトを接続して、日本で使ってもいい周波数「E1」に変更。

FCにバッテリーをつなぎ、カメラの映像がモニターに飛ぶかチェック。
ちゃんと映像が飛ぶなら次の工程に進みます。
人によって作業順序が違うと思います。この記事にかいてある順序はあくまで自己流です。
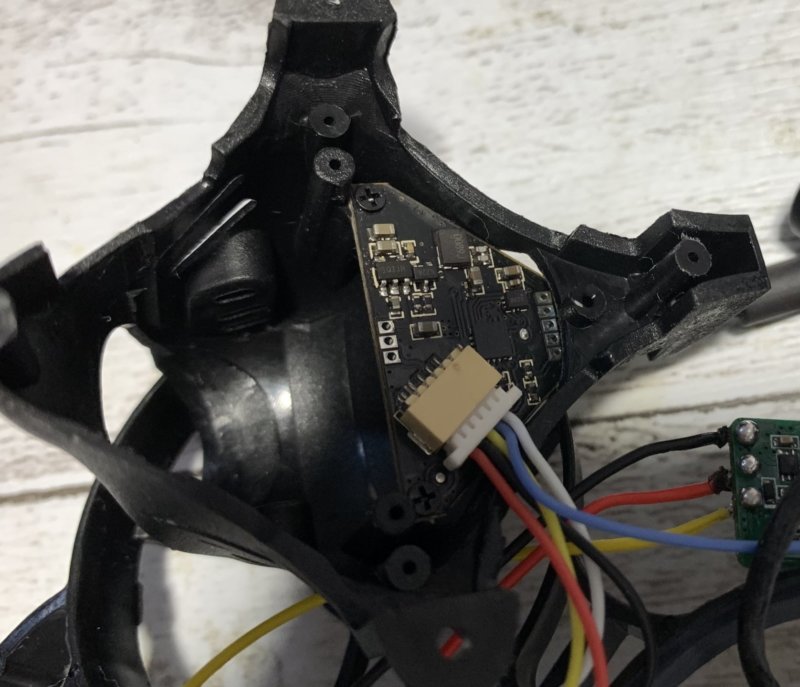
次にレシーバーの配線をとりつけます。
SBUS受信のレシーバーなら回路図どおりにとりつければOKなのでそこまで迷うことはないと思います。

こんな感じの状態で、バッテリーをつなぎレシーバーと送信機のバインドを行いました。
バインドが終わったら、FCとパソコンを接続してベータフライトコンフィグレーターを起動して、送信機からの動作がちゃんと動くか受信機タブで確認します。
ここまで終わればあとは組み立てていけばOKです。
マイクロドローン組み立て
まずはVTXをキャノピーに取り付けます。
このキャノピーは、使うのがはじめてだったのですが作りがよくできていますね。
まぁ当たり前なのかもしれませんが、BetaFPVのVTXとサイズがぴったりだし、カメラの取り付けやカメラのDVR基盤の取り付けもやりやすいです。

ちなみにこのキャノピーのカメラ取り付け位置の長さは19mmですので、この記事で使用しているカメラを取り付ける場合19mmに幅を変更するマウントをつけてから取り付けます。
VTXを取り付ける前にカメラだけ固定した方がやりやすいかもしれません。
順序としては「カメラを固定」→「VTXを固定」→「カメラのDVR基盤を固定」です。
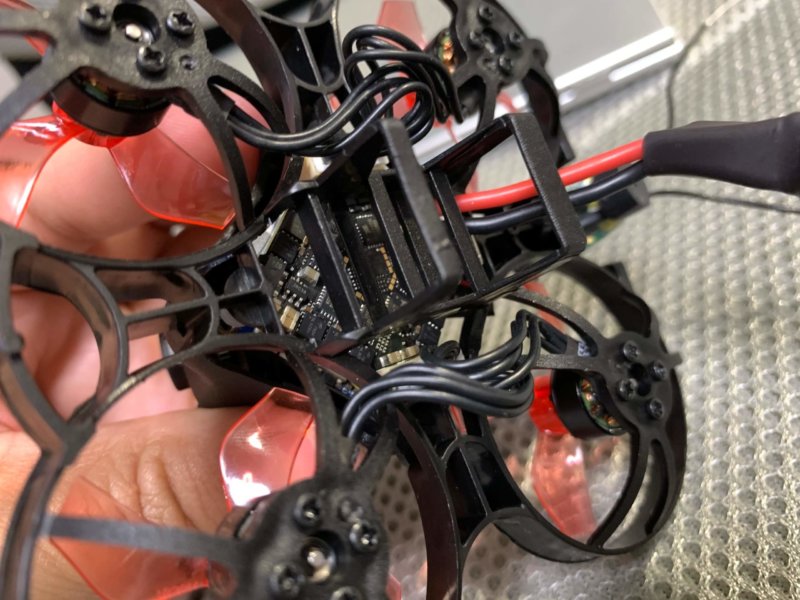
FCは付属のゴムを角部分にとりつけて、フレームに差し込むだけです。
自分はとりあえずネジの固定などはしていません。
[chat face="AKIRA_avatar_1514709945.jpg" name="AKIRA" align="left" border="blue" bg="none"]BNF(完成品)のBeta75HDを内部まではいじったことがない為、本来の姿がよくわからない(笑)
[/chat]
ちなみに後になって気づいたのですがレシーバーはFCの下に入れてあげるとよさそうです。

いちどここまで組み上げてから、レシーバーどこにしよう??って迷っていたら、
FCの下にスペースがあることに気づきました。
たぶんBNF機もレシーバーは下に設置されているのかもしれません。
それとモーターに関してはFCやキャノピーを組んだ後でも取り付け可能です。
まぁキャノピーを組む前に取り付けて、
・モーターが動くか
・モーターの回転方向があっているか
確認しておくといいと思います。
自作マイクロドローン:ベータフライトの設定
ポート
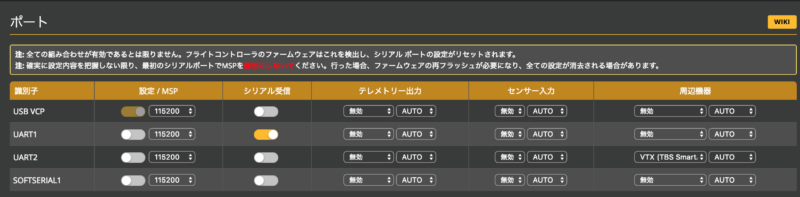
「UART1」をレシーバーでシリアル受信がONに変更。
「UART2」をVTXのスマートオーディオに割り当てています。
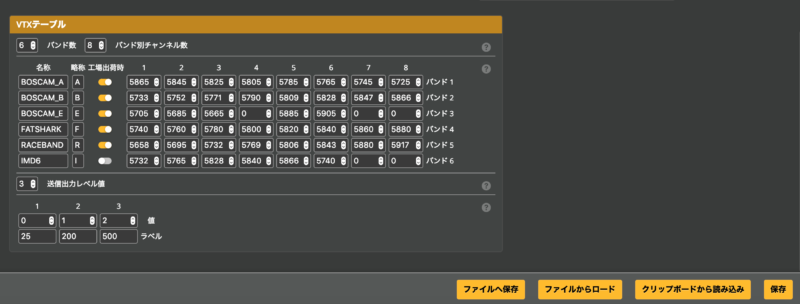
FCにインストールされているベーターフライトのバージョンが4.1以上で、VTXを正常に利用するには「映像伝送用送信機」タブの設定を行う必要があります。
すべて細かく打ち込んでいってもいいのですが、あらかじめ用意されているVTXテーブルを読み込んで、あとで自分で利用するVTXに合わせて出力などを編集する方が楽です。
VTXテーブルは以下のページよりダウンロードすることができます。
https://github.com/betaflight/betaflight/wiki/VTX-tables
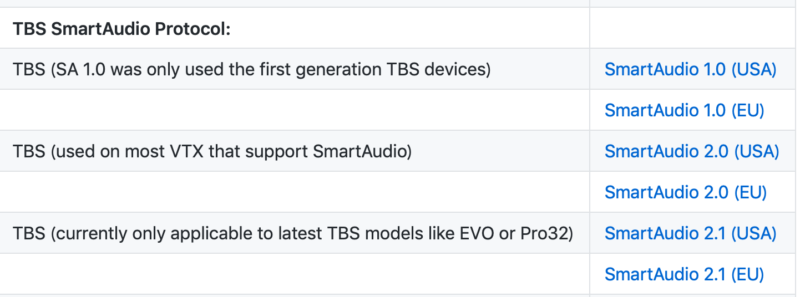
今回自分が利用テーブルは、「TBS (used on most VTX that support SmartAudio)SmartAudio 2.0 (USA)」です。
カーソルを合わせ、
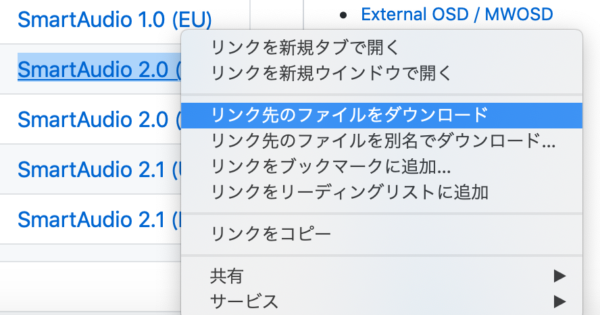
「リンク先のファイルをダウンロード」してあげます。
その後、ベータフライトコンフィグレーターの「映像伝送用送信機」タブからVTXテーブルを読み込んあげればOKです。
VTXよって出力が変わってきますで、変更等はしてください。
詳しくは下の記事でも紹介しています↓↓

それと、ブロガーのmoccaさんがyoutubeで詳しく解説しているので、よくわからない方はこちらを視聴してみてください↓
VTXテーブル「映像伝送用送信機」タブについての補足
VTXテーブルの読み込み、または自分でVTXテーブルの作成する必要があるのはFCにインストールされているベータフライトのバージョンが「4.1.0」以上のものになります(BNFドローンの場合、メーカーがテーブルを作成して入れてある場合が多いです)。それ以下のバージョンの場合「映像伝送用送信機」タブが表示されません。
それと、ベータフライトの設定を行うアプリ「Betaflight Configurator」のバージョンが古いものだとVTXテーブル「映像伝送用送信機」タブの項目がありません。
自分の環境で確認してみたところ

Betaflight Configurator → 10.6.0 以上
FCにインストールされているベーターフライト → 4.1.◯ 以上。
でVTXテーブル「映像伝送用送信機」タブが表示されます。
モーターの設定
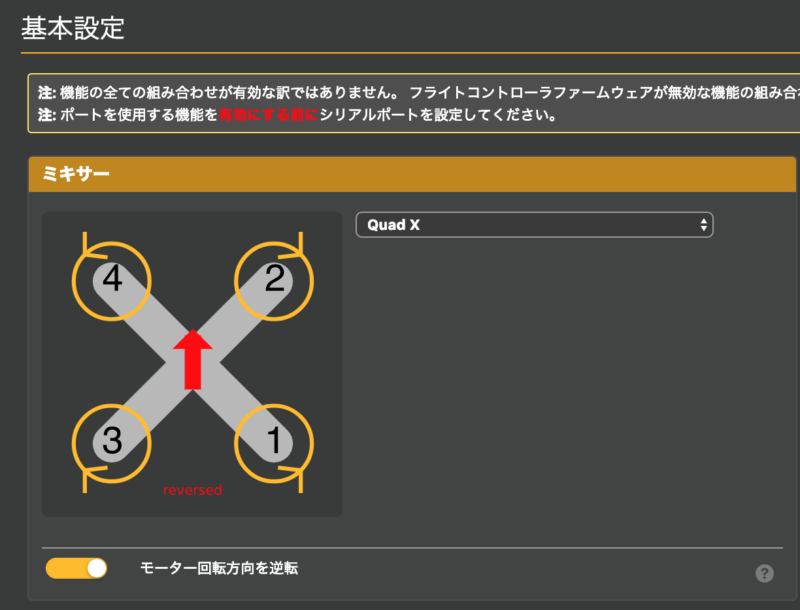
今回のFCの場合デフォルトの設定でモーターの回転方向は逆回転になっています。
上の画像の回転向きと実際に回る回転の向きが違う場合、設定で変更する必要があります。
モーターの回転方向をチェックする方法は、実際に機体と送信機をバインドさせスロットルを入れる方法と、ベータフライトを使って回転させる方法の2種類あります。
回転方向をチェックするときはプロペラを外した状態の方がいいです。
おそらくほとんどの方が自作ドローンを作るときは、ベーターフライトコンフィグレーターからモーターを回転させてチェックしていると思います。
ベータフライトコンフィグレーターでモーターの回転方向をチェックするやり方は、モータータブに合わせて、
「リスクを理解して、、、、、」のチェックを入れて、モーター1〜4まで1個ずつゲージを上げてモーターの回転方向が、画面に出ている回転方向と一致しているか確認します。
バッテリーはつないでいないと、モーターは回らないのでドローンとバッテリーをつないだ状態でチェックします。
モーターの回転方向を変える方法
モーターの回転方向を変えるには「BLHELI」というアプリを使用します。
BLHELIはドローンにバッテリーをつないだ状態で使用します。
アプリを起動したら「connect」を選択して「read setup」→

今回は2番と3番のモーターの回転方向が逆回転だったので、「blheli configurator」で「reverse」をかけてあげました。
最後に「wrlte setup」をクリックしてあげればモーターの回転が逆になります。
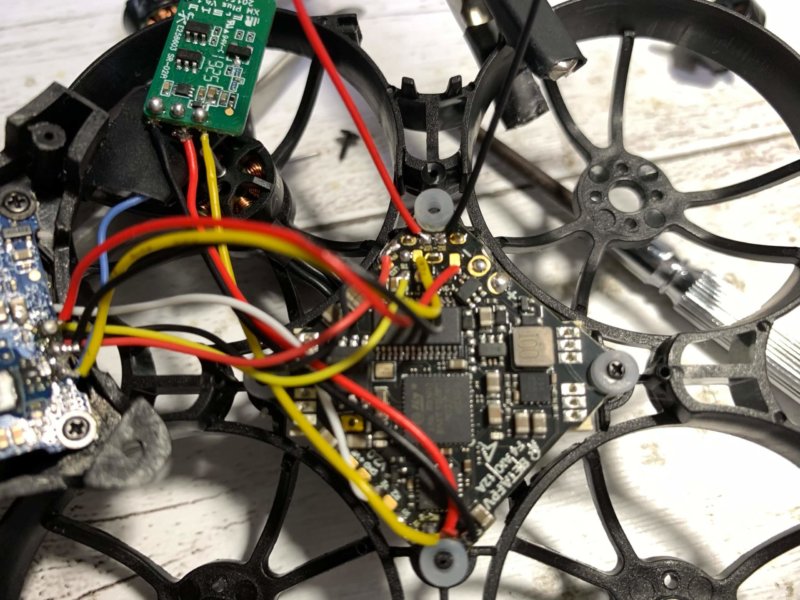
自作マイクロドローン 完成



最終的にはこのような形になりました。
レシーバーはFCの下に入れて、ブザーも取り付けて、後方で簡単にタイラップでとめています。
まだ室内フライトしかしていませんが、そこそこいい感じで飛びそう!(たぶん)
ただこのドローンにちょうど良さそうな3s450mAhのバッテリーを1個も持っていなことに組み立てが終わってから気づきました(笑)。
とりあえず、3s300mAhと3s600mAhは持っているのでそれで飛ばしてみようと思います。
GNB 3s600mAhでテストフライトしてきました
GNB 3s600mAhでテストフライトしてきました(ほんとうは3s450mAhで飛ばしたい)。
風速は3mくらい。
安定感のない感じのフライトになってしまいました。
機体の重量に対してバッテリーが重すぎるせいなのか?
それとも他に原因があるのか?
また風のない日にでも飛ばしてみたいと思います。
最後に
かなり雑な解説で「マイクロドローンの作り方」を紹介してきましたが、初心者の方の参考に少しでもなれば幸いです。
自作ドローンの作り方の基本は、ドローンのサイズには関係なく一緒なので、他の記事も参考にしてみください。
自作ドローンの作り方の記事一覧は下のページで確認できます↓↓



