今回は5インチのフリースタイルドローンを作った時の手順を紹介します。作り方は自己流ですので、参考程度にしてください。
5インチフリースタイル ドローン パーツ選び

まずは5インチドローンを作るにあたり選んだパーツリストを紹介します。
フレーム
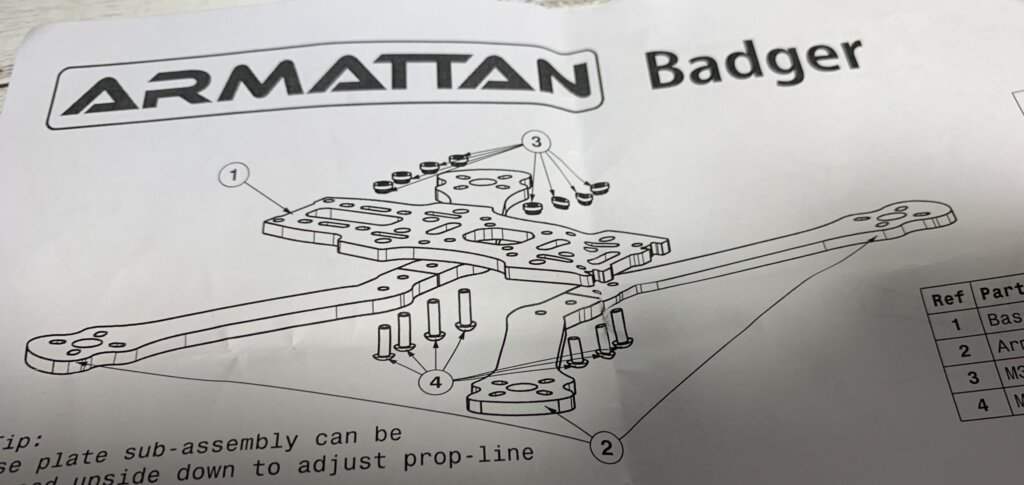
フレームは「Armattan Badger」にしました。価格は1万円くらいで購入可能です。
アームの横幅が広めにできているので、4個分割タイプのESCを乗せやすい設計になっています。
なんでESCぶんかつタイプにしたかというと
- ちょっとレトロな感じのドローンみたいな見た目が好き
- モーターなどが焼ける時に、ESCの破損が1個だけで済む場合が多いのでお金があまり飛ばない
- それ用のFCが2000円以下で安く売っていた
- 安いFCのファームウェアがFalcoXに対応していた(後でライセンだけ購入してインストールする予定)
理由はこんな感じです。

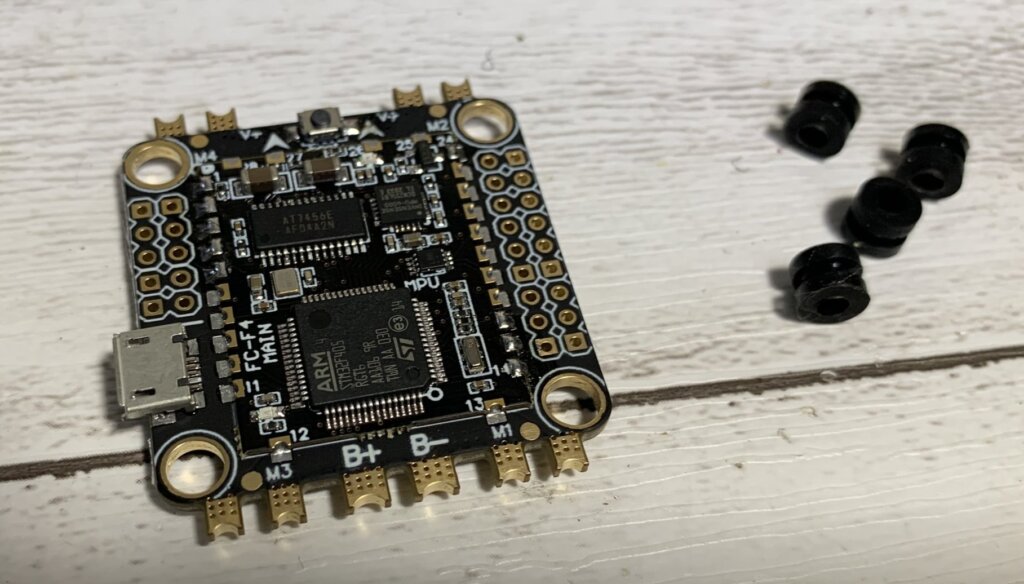
FC(フライトコントローラー)
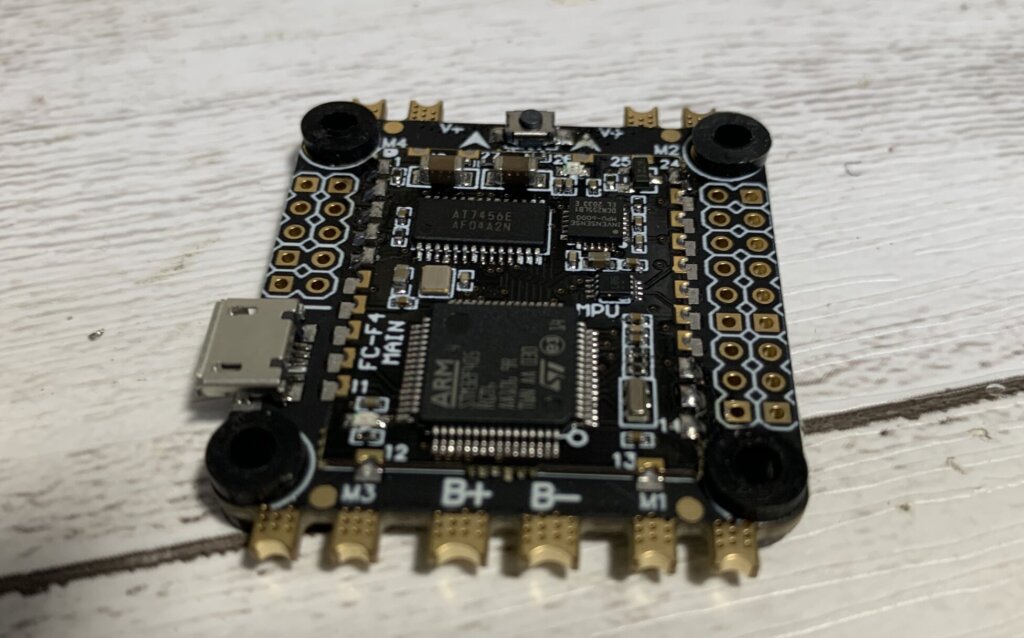
FCをこれを選んだ理由は上に書いてしまいましたが、安かったこととファームウェアがFalcoXに対応していたからです。
アリエクスプレス なら2個セットで34ドルくらいで購入できます。
あとで「ファームウェア」を入れ替えます

上の画像はこのFCの回路図。9V電源がないところがいまいちポイント。
7V以上の電源を取りたくて、自分はXT60の電源ケーブルの根本からとりました。6sリポなど使用するときは注意が必要。
ESC

ESCは家にあまっているものを使用しただけで選んだ理由は特にありません。
価格は「Armattan」公式サイトで4個セットで5000円くらいで購入できます。そこまでは安くはないです。
安いものを探せば45Aくらいのもので1個1000円くらで購入できるものもあるので、ESCが別々のタイプで自作ドローンを作りたいなら他のものを選択してもいいと思います。
とりあえず、アーマタンのESCはそこそこ使いましたが、2個燃やしたくらいでそこまで壊れない印象です。
この記事のESCはArmattan公式サイトで購入できますが、もっと安いものを使うなら下のESCあたりでもDSHOT600には対応しているみたいなので問題ないと思います。(使ったことはないので、よくなかったらごめんなさい)

モーター

モーターは価格が安くデザインが気に入ったのでこいつにしました。
6sのドローンを作りたいので1700kvにしました。1900kvでもいいかもしれません。ちなみにkv値に関して詳しく理屈をわかっていないので、6sを作る時は1700~1900kvのものをチョイスしています。
モーターサイズに関しては5インチを作るときは2306あたりを使用することがおおいです。

FPVカメラ

FPVカメラは無難な感じの1000TVLのプレデターにしました。
めっちゃ綺麗に見えるってわけではありませんが、悪くはないです。

レシーバー
レシーバーは通信方式をS-FHSSを使用したかったので「R2000SBM」にしました。
AC900などの互換性のあるレシーバーの方が、価格は安いんですけどRX LOSSをおこすと、がっかりするので、純正品を使うことにしました。
少し高い価格がネックです。

価格を安く抑えつつ通信方式をS-FHSSにしたいなら「AC900」あたりでいいと思います。
VTX
VTXは申請済みのものや、今後申請する予定のものを使用すればいいと思いますが、このFCの場合電源が5Vしかないので、7V~26Vの電圧が必要なVTXは取り付けることができません。
たぶんバッテリーからとって電圧を下げたりなど、やり方はあると思いますが自分はHGLRCの5Vでも動作するものを取り付けることにしました。

プロペラ
プロペラは最近どのドローンにも使用している「Ethix」のものにしました。
何種類か飛ばしてみましたが、プロップウォッシュがでずらいわりには、クイックに動かせる感じがします。
ということで自分はこのペラが好きなので使用しています。

5インチフリースタイル ドローン 組み立て
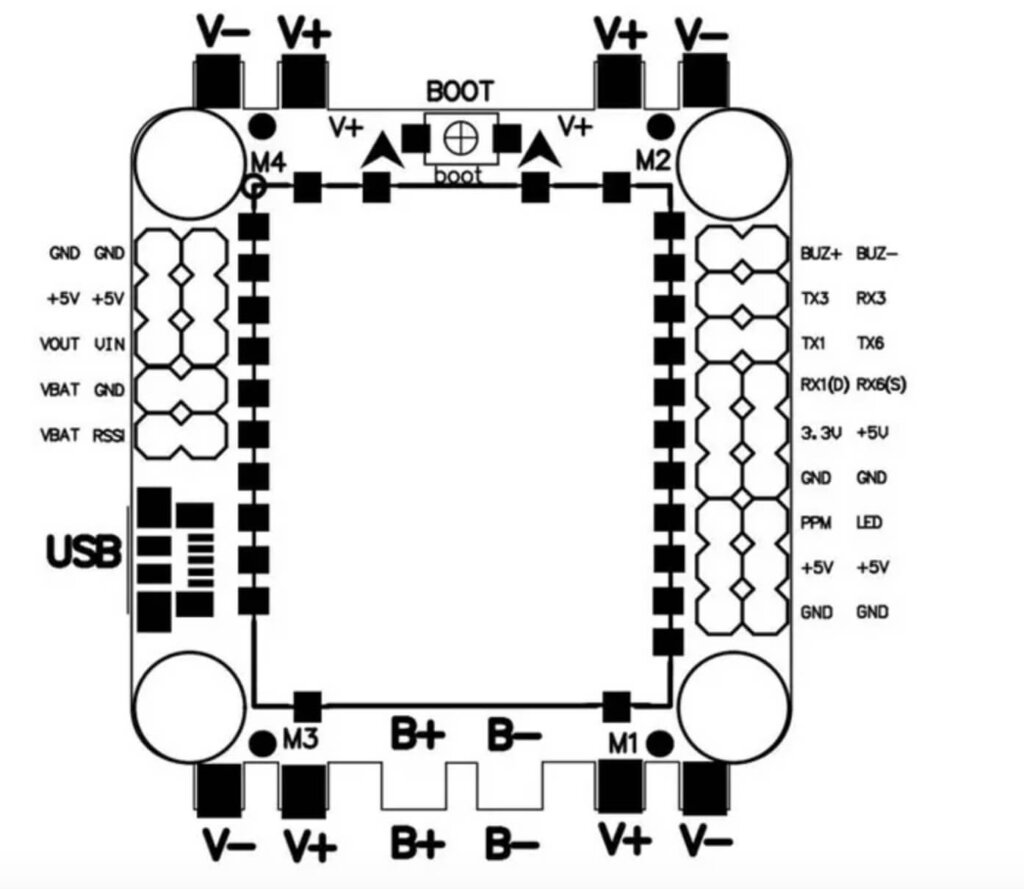
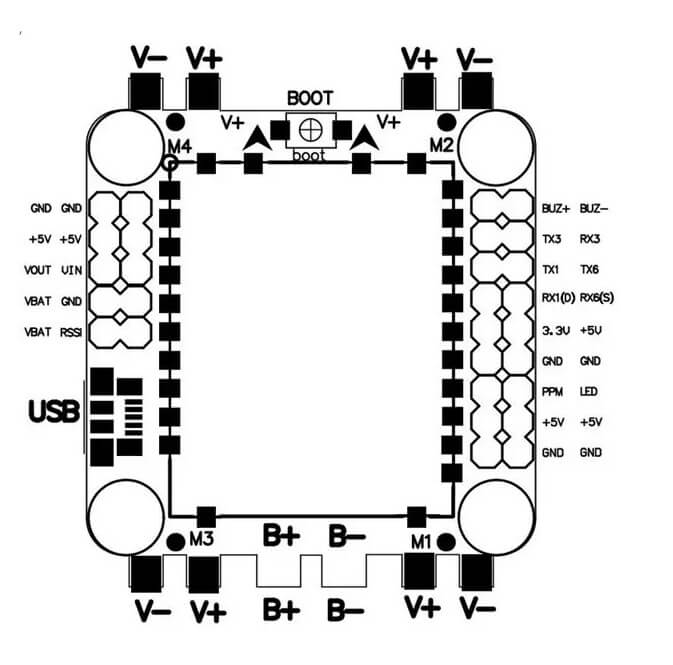
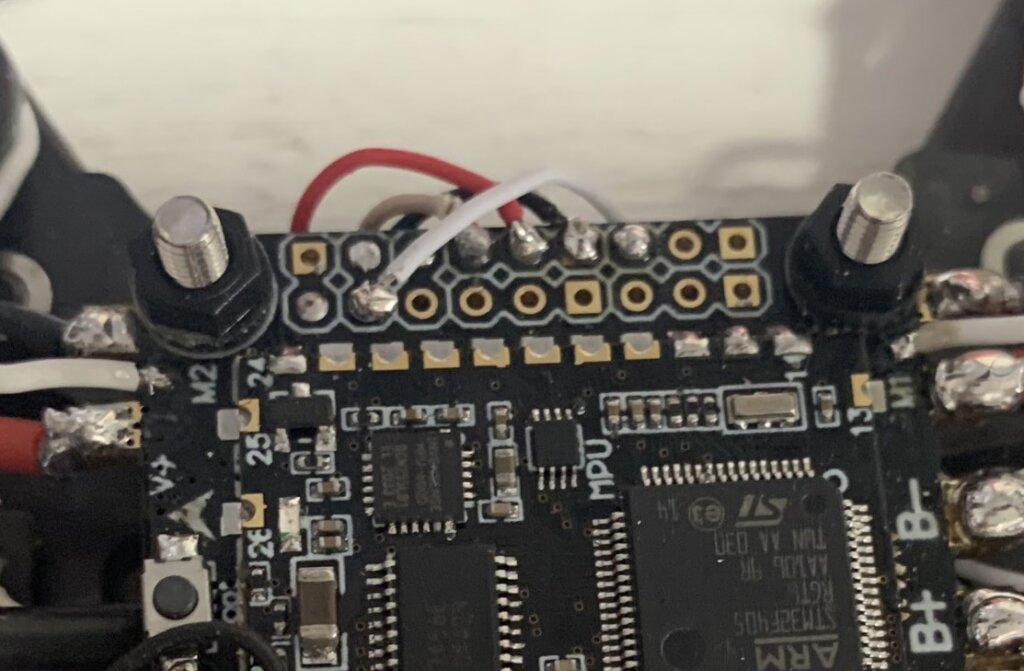
組み立てするにあたり必要になるのが回路図です。FCを購入するとついてくるものもあるし、販売ページに記載されているFCもあります。
基盤じたいにも記載されていますが、文字が小さく刻印されているだけなので上の画像のような回路図がないとはじめて扱うFCの場合組むのが大変だと思います。
では、自分が組み立てていった手順を紹介します。
フレームの組み立て

まずはフレームから組みたてていきます
フレームは説明書などをみて組み立てていけばOKです。

説明書がない場合は公式ホームページで確認してみたり、さいあく形状をみながら組んでいけばなんとか大丈夫だと思います。
モーターの取り付け

フレームをある程度組んだら自分は先にモーターを取り付けていきます。
FCの取り付け
次にFCを取り付ける準備をしていきます。
今回購入したFCの付属品はネジの部分のゴムだけでした。FCによってはバッテリーケーブルやタワーをつけるときのネジなどもセットでついています。

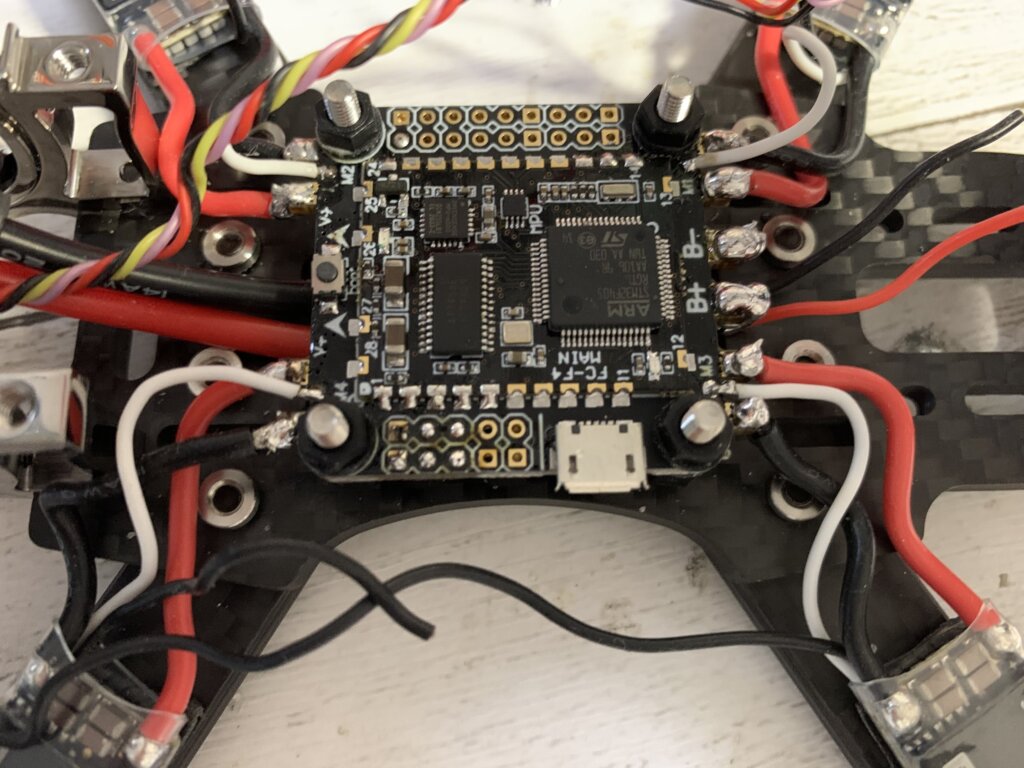
まずは初めにFCにバッテリーの電源ケーブルを取り付けていきます。
このフレームの場合、バッテリーとの接続位置を機体の先端の方でおこなうように設計されているので、FCの裏側からバッテリーケーブルをハンダつけしました。
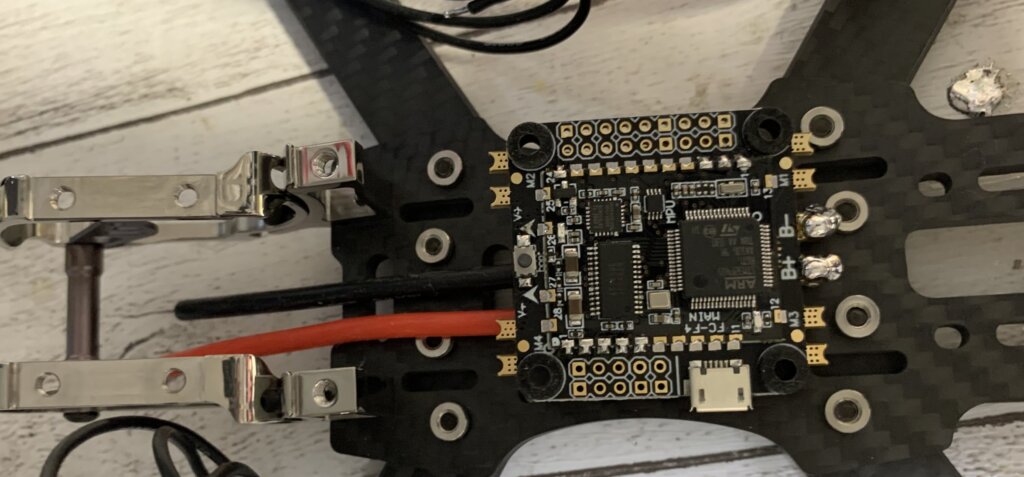
左側が機体の先端です。FCの下に配線をとおして先端にいくようにしました。
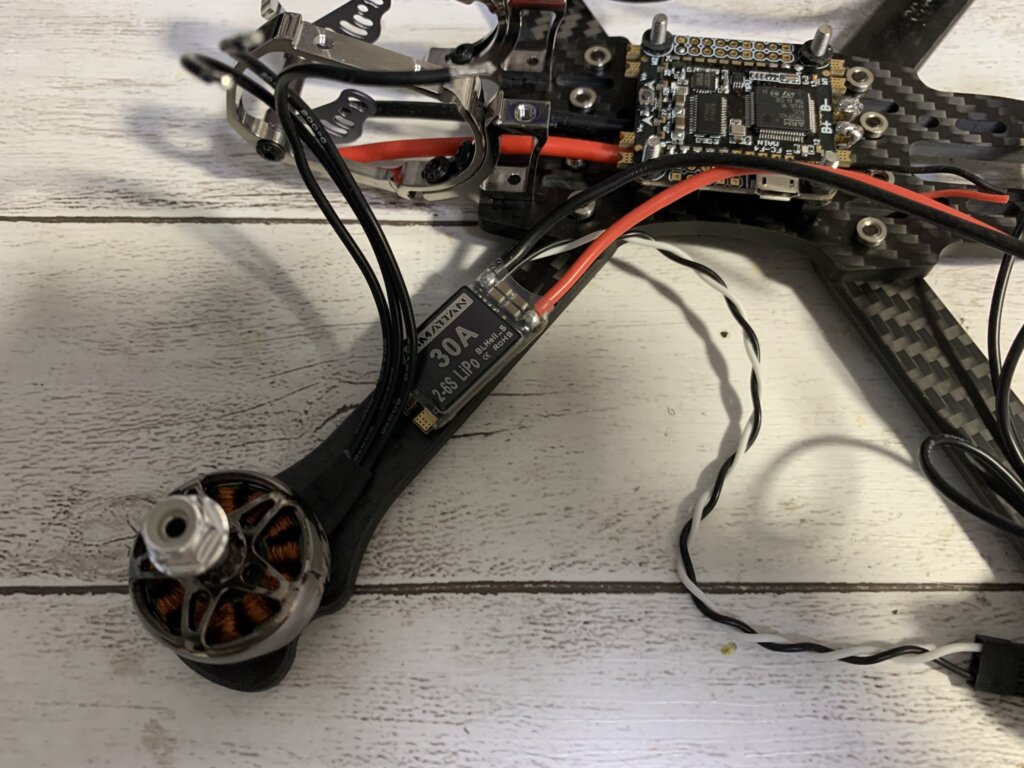
次にESCの位置を決めてモーターの配線をカットしていきます。

現在の状態はこんな感じです。
- フレームの組み立て
- FCの取り付け(バッテリーケーブル、ブザーの配線はんだ済み)
- モーターの取り付けと配線のカット
ブザーの取り付けている画像を撮影するのを忘れてしまいましたが、最初に配線をハンダつけした理由は、FCの裏側からはんだしたかった為です。
このFCの場合、FPVカメラやレシーバー、VTXの配線すべて、FCの裏側からでもとれるようになっています。配線をごちゃごちゃ見える場所にあるのが嫌な方は下側でハンダした方がいいかもしれません。
裏側からハンダする場合は、配線を長めにしてハンダしてから、あとでパーツの位置決めするときに配線をカットするといいと思います。
ESCの取り付け

次にアームの上にESCをとりつけていきます。
モーターの配線の先端に軽くハンダを乗せて、

そのあとESCの基板部分にフラックスを塗り、ESCにはんだをのせてから、最後に結合させるとやりやすいです。

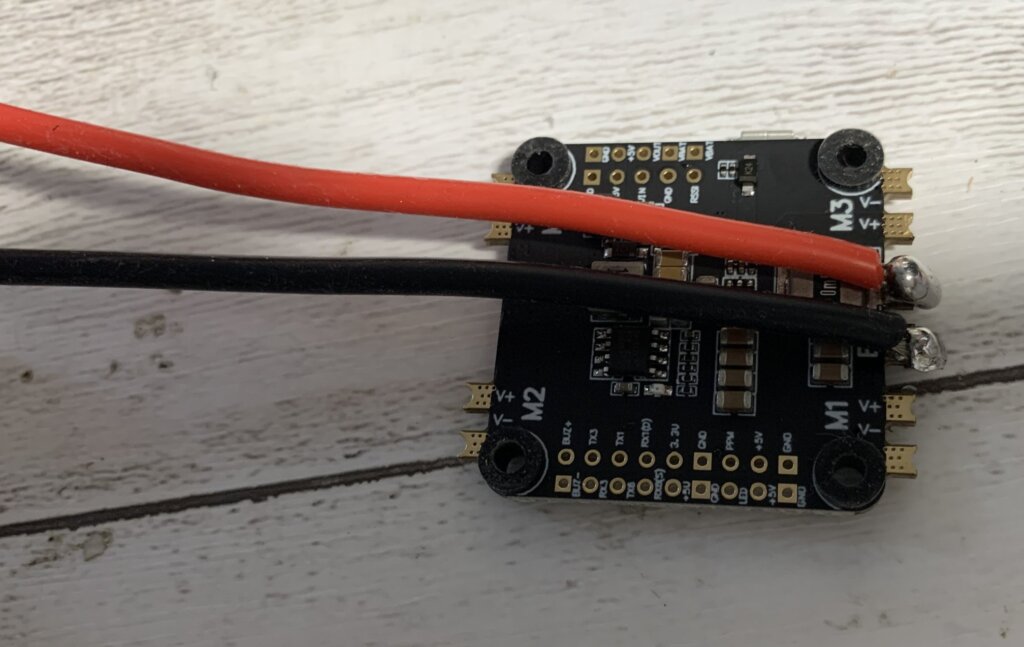
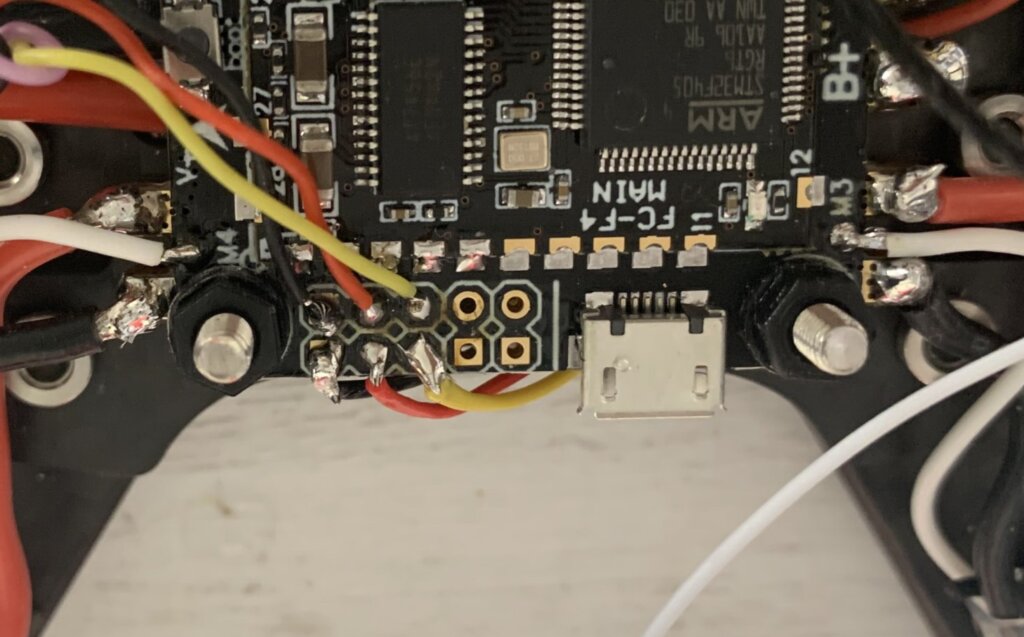
この記事で使用しているESCの場合、FC側との接続する配線はあらかじめついています。
上の画像のようにFCにはハンダつけすればOKです(このFCの場合を前提に話は進めていきます)。
自分は細い黒い線は何につかうかよくわかっていないので、カットしちゃいました(たぶんアースです)。
とりあえず同じようにESCを4個FCにはんだします。
それと画像をとるのを忘れてしまいましたが、この時点でバッテリーケーブルの先端に「XT60プラグ」をつけてバッテリーと接続してあげられるようにしました。
モーターが回るか確認

ここまでやれば、モーターがちゃんと回転するか確認することができます。
ベータフライト コンフィグレーターを起動して、FCとパソコンをUSB接続。次にバッテリーを差し込み、モータータブの「リスクを理解してなんちゃら」の部分にチェックを入れてモータのゲージをあげればモーターがまわりはじめます。
それとこのFCの場合モーターのプロトコルがONEショット125だったのでDショット600に変更してあげました。
125だと、ゲージを4分の1くらいまであげないとモーターがまわらないです。
VTXの取り付け
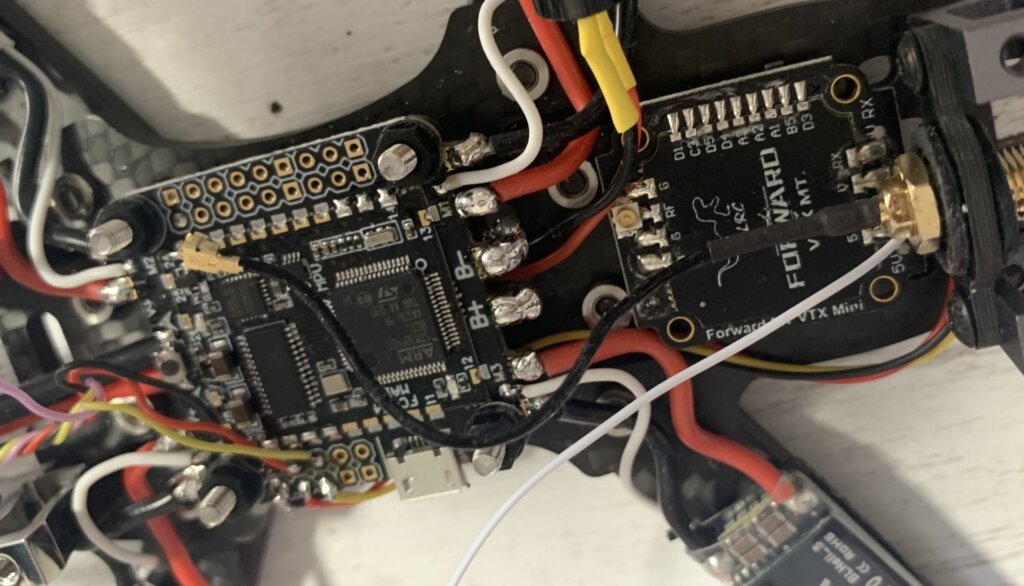
VTXは機体の後ろに設置しました。
配線はこのFCの場合、上の画像の下側がVTXの配線です。
左から「アース、電源、映像」の順番になっています。
上の段はFPVカメラの配線で同じく「アース、電源、映像」の順番になっています。

それとビデオコントロール「スマートオーディオやIRCトランプ」の配線は上の画像の下側の白の配線がそうです。回路図の「T3」にはんだすればOKです。
レシーバーの取り付け
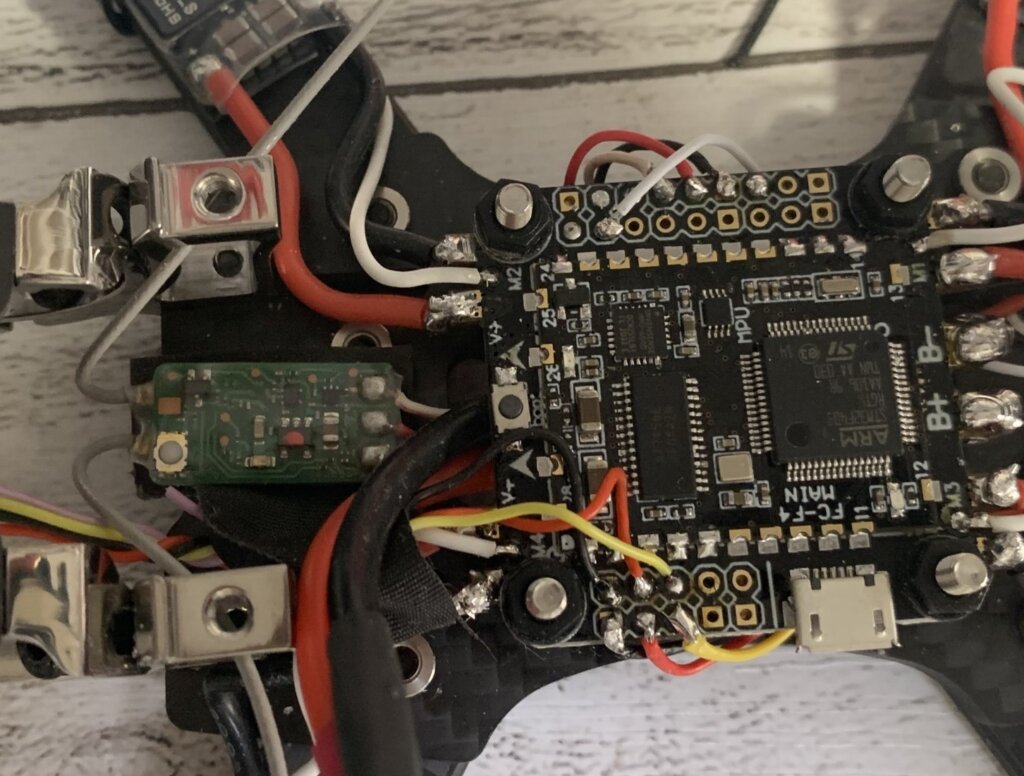
レシーバーの取り付け位置はカメラのうしろあたりにすることにしました。
配線は上の画像の一番上、「白→SBUS 赤→電源 黒→アース」になっています。
FPVカメラ
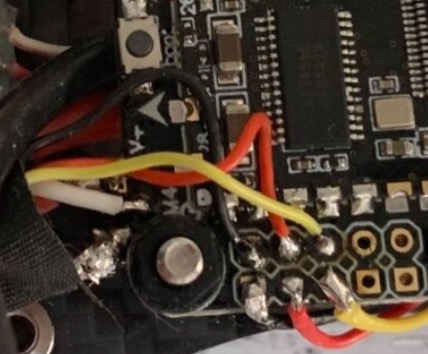
FPVカメラの配線は上の画像の上段「黒→アース 赤→電源 黄色→映像」ではんだすればOKです。
このカメラの場合、紫の線も出ていてますが、これはカメラの設定をFPVゴーグルの画面で操作するためのOSDなんちゃらだと思います(たぶん)
このFCの場合たぶん使えません。なので気にしないでテープなどでまとめておけばいいと思います。

いきなり画像とんじゃいましたけど、ここまでくれば組み立てはほぼ完了です。
とりあえず上の画像が回路図になりますので、それどおりに組めばOKです。
5インチフリースタイル ドローン Betaflightの設定
ベータフライトのバージョンと種類は以下のとおり。
ファーム: BTFL 4.1.0
ターゲット: OMNIBUSF4SD
古いFCだと思いますがバージョンはわりと新しいものが入っていました。
それと、ベータフライト の設定を行う前に送信機とレシーバーのバインドを済ませておくといいです。ベータフライトの設定でポートと基本設定の部分をいじらないと、送信機で操作をすることはできませんが、レシーバーと送信機のバインドだけなら、ベータフライト の設定前にすることができます。
送信機とレシーバーのバインド方法
この記事で使用しているR2000SBMの場合は、バッテリーを差し込んで機体を起動→レシーバーのバインドボタンを長押しすると受信機のLEDが素早く点滅(バインド待ちのサイン)→FUTABAのS-FHSS対応の送信機の電源を入れればバインド完了。そんな流れです。
FUTABAの送信機でもS-FHSSの電波を出している状態にしないと電源を入れてもバインドされません。トレーナーモードになっていてバインドできなかったり、S-FHSSじゃない通信方式になっていなかったりしてバインドできない場合などあります。
Frskyの外部受信機の場合、バインドボタンを押しながらバッテリーを入れるとバインド待ちにるものがおおいです。
例をあげるとFrsky XM+の場合、バインド待ちのサインはLEDが赤で点灯。
送信機側からバインドボタンなどをおしてやると、赤点滅にかわり、それがバインドOKのサインです。
ポート
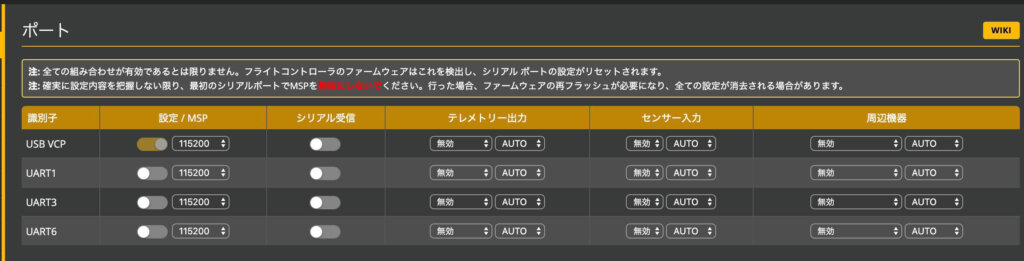
ポートのデフォルトの値は上の画像のようになっています
回路図どおりに組む時の設定は
UART3:スマートオーディオまたはIRCトランプ(VTXによってコントロールするプロトコル?が違うのでVTXにあったものを選択。今回自分が使用しているVTXの場合IRCトランプを選択します)
UART6:シリアル受信ONに(フタバのS-FHSSやFrskyのレシーバーを使用する場合。それ以外の受信機の場合はよくわからんです)
ポートは上のように設定すればOKです。
基本設定
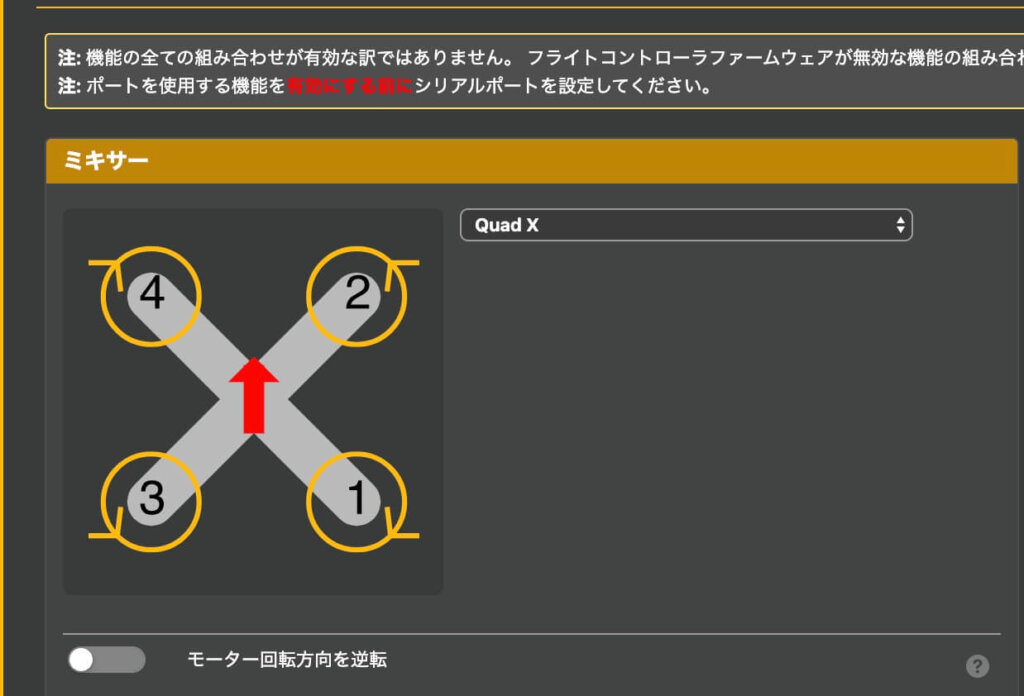
モーターは逆回転にしました。これはお好みで!
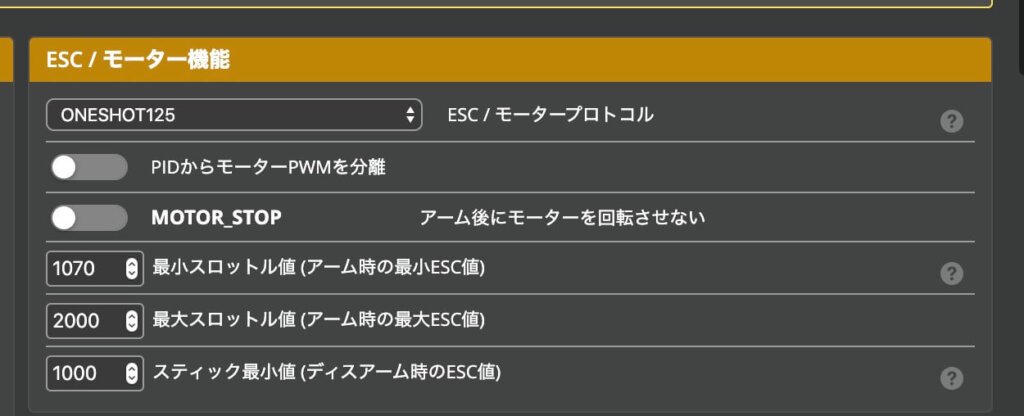
モータープロトコルはDショット600に変更。

エアモード常時ONが嫌いなので、OFFに変更。
それと画像をとるのを忘れてしまいましたが、基本設定の項目に
「シリアル接続受信機」という項目があるので「SBUS」に変更しました。FUTABAのS-FHSSやFrskyの通信方式の場合、ここをやらないとレシーバーとバインドしてもコントロールすることはできません。
PID

PIDはスライダーONでデフォルトの値になっていました。自分はいつも基本的にはPIDはいじりません。飛ばしてみて、機体がブルブルしたりする場合のみスライダーを移動したりします。
RATE
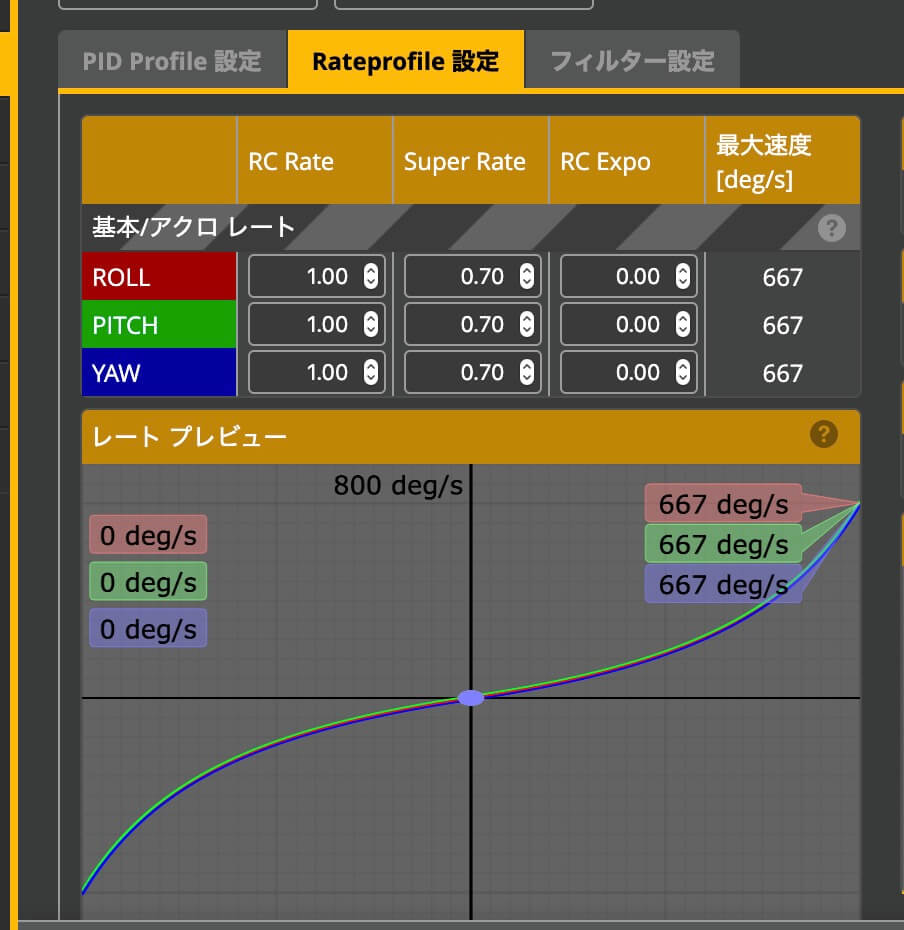
上の画像はRATEのデフォルトの値。
自分はいつも高めに設定します。これもお好みで。
OSD
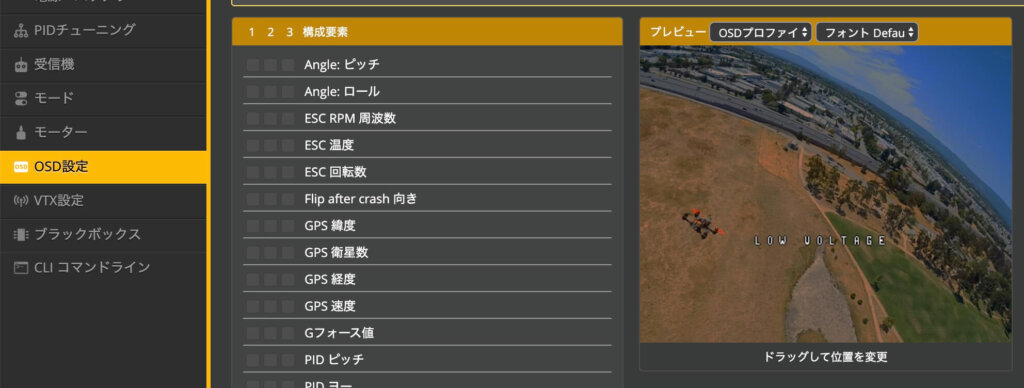
OSDはデフォルトの状態だとほとんど何も表示されない設定になっていますので、好みで設定すればOK
VTXの設定
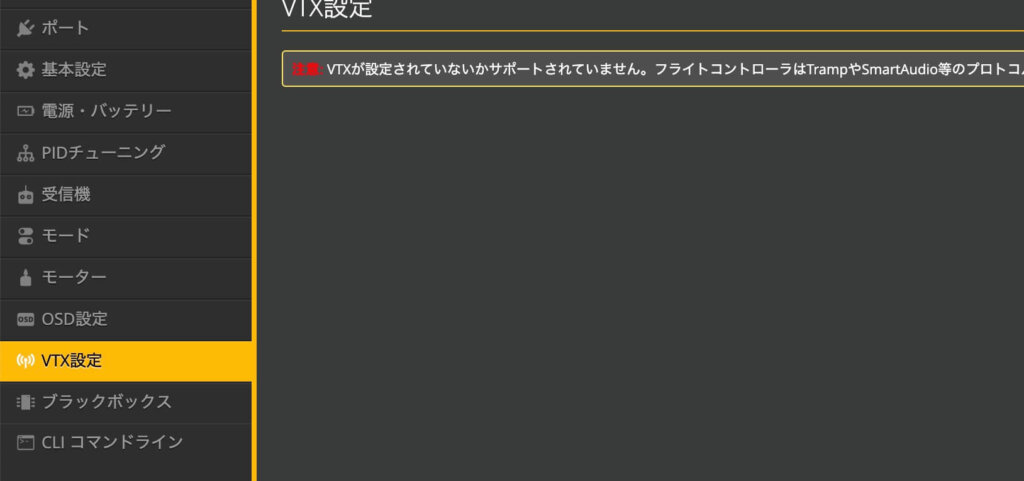
VTXの設定はデフォルトだと何も入っていない状態なのでテーブルを入れてあげる必要があります。
もちろん、テーブルを入れないでもVTXについているボタンをポチポチすれば周波数や出力は変更できますが、それはそれで面倒ですよね。
なのでテーブルを入れてあげましょう。テーブルを入れるにはポートの設定で「スマートオーディオまたはIRCトランプ」を入れてないとテーブルたしか入れられないので、ポートの設定だけは済ませておく必要があります。
テーブルの入れ方は下の記事を参考にしてください↓
テストフライト
何本か飛ばしてみましたがやすいパーツを使っているわりには悪くないです。
ただなんとなくパンチが足りないというか、パワーはあまりでない印象です。
「Falco X」にファームウェア変更してフライト
ライセンスを購入して「Falco X」にファームウェアを変更してみました。パンチ力上がってかなり気持ちよく飛気がします(たぶん)
最後に
かなり大雑把な記事になってしまいましたが、あとでわかりやすいように修正するなりしようと思います(たぶん)




はんだがかなり雑で下手なので、恥ずかしいからじっくりは見ないでね。