
今回は65mmのマイクロドローンで重量が21gと軽い「Eachine UZ65 65mm」をレビューしていきます。

Eachineのクーポンコード一覧です。クーポンコードをクリックするとクーポンコードがコピーされて、商品ページに移動します。そのまま貼り付けて使用できます。
その他の、banggoodのクーポンは下の記事で紹介しています↓

Eachine UZ65 65mm ドローン スペック
| カメラ | モデル:RunCam Nano 3 イメージセンサ:1/3 "CMOS 水平解像度:800TVL レンズ:2.1mm(M8)FOV 160° デイ/ナイト:カラー 重量:1.2g 寸法:L14mm × W14mm × H9mm |
|---|---|
| 重量 | 21.5g |
| フレーム | ホイールベース:65mm 80mm * 80mm * 40mm |
| FC、ESC | CrazybeeF4FR CrazybeeF4DX MCU:STM32F411CEU6(100MHz、512Kフラッシュ) センサ:MPU-6000(SPI接続) ボードサイズ:28.5 × 28.5MM 電源:1-2Sバッテリー入力(DC 2.9V-8.7V) 内蔵5A(各)Blheli_S 4in1 ESC Dshot600準備完了 内蔵のBetaflight OSD(SPIコントロール) 内蔵SPI Frsky / Flyskyレシーバー ビルトイン5V 1A BEC 内蔵電圧検出 |
| VTX | 出力電力:25mw〜100mw 周波数:40CH 入力電圧:3.3V〜5.5V 消費電流:300mA(タイプ) 周波数:5.8GHz、5b、40チャンネル レースバンド付き Smartaudio対応 |
| モーター | モード:SE0802 19000KV 設定:9N12P ステーター径:8mm ステーター長さ:2mm 軸径:Φ1mm モーター寸法(直径*レンズ):Φ10.5mm* 14.9mm 重量(g):1.9g No.of Cells(Lipo):1Sのみ |
| レシーバー |
・選択可能な内部レシーバー External DSM2/DSMX Receiver External TBS Crossfire Nano RX Internal SPI Flysky Receiver Internal SPI Frsky Receiver |
| 価格 | 1万円くらい |
Eachine UZ65 65mm ドローン

箱をあけるとこんな感じで収納されていました。
Eachine UZ65 65mm セット内容

1 x UZ65 65mm 1S 65mmフープドローンフレーム
1 x SPIレシーバーオプション1:Superbee F4 FCビルトインFrsky SPI D8 RX
4 x SE0802 KV19000ブラシレスモーター
1 x HQPROP 35mm-3ブレードプロペラ(4cw + 4ccw)
1 x Runcam Nano3 1/3 CMOS 800TVLカメラ
1 x 5.8G 25mw-100mw 40ch vtx
4 x 1S 300mah 30C LiHVバッテリー
1 x 1S Lipo / LIHV USB充電器
1×プロペラ分解ツール
1×Eachineハンドバッグ
バッテリーが4個付きなのはうれしいところ。
「Eachine」のドローンは比較的に他のメーカーよりコスパがいいところが好きです。
Eachine UZ65 65mm ドローン
Eachine UZ65 65mm をちょっとだけ分解。

キャノピーをとるとこんな感じでVTXがみえます(上の画像VTXのアンテナはずしてます)。

VTXとFCの間には両面テープが入っていました。
FCには、なんかハンダをのせて拡張できそうな部分がたくさんありますね。
あとで回路図みてみます。
Eachine UZ65 65mm ドローン 設定

ベータフライト のバージョンは「4.1.1」
ファームウェアの種類は「CRAZYBEE4FR」。
ポート
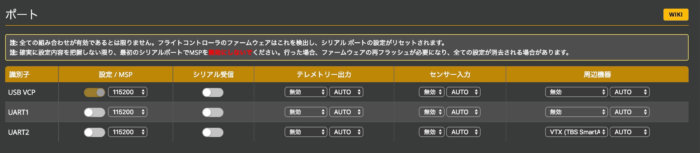
UART2にスマートオーディオ。
基本設定
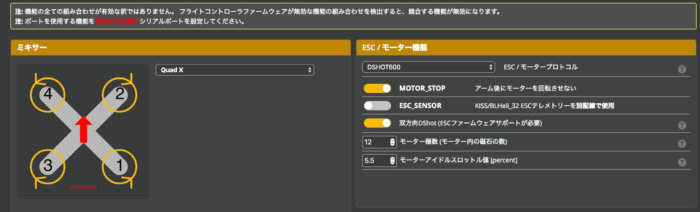
デフォルトでモーターが逆回転になっていますね。
そのほかデフォルトでの基本設定の値はこんな感じ。
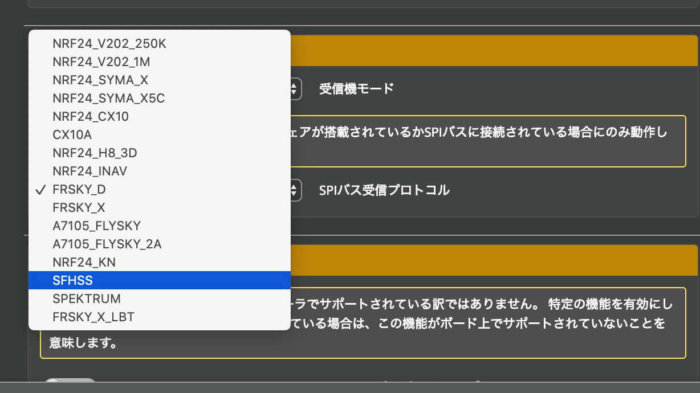
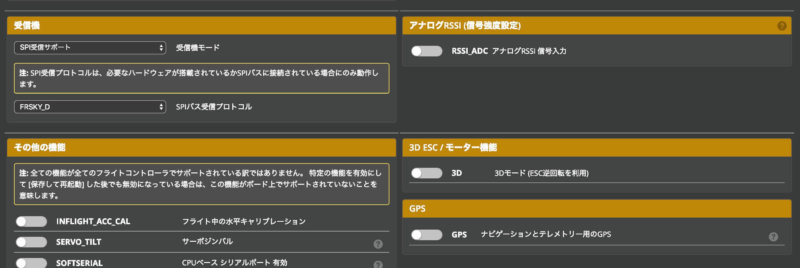
自分はFutabaのプロポとバインドしたいので「SFHSS」に変更。
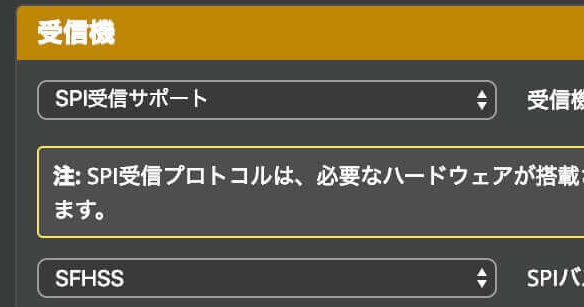
こんな感じ。
保存して再起動はわすれずに。
映像伝送
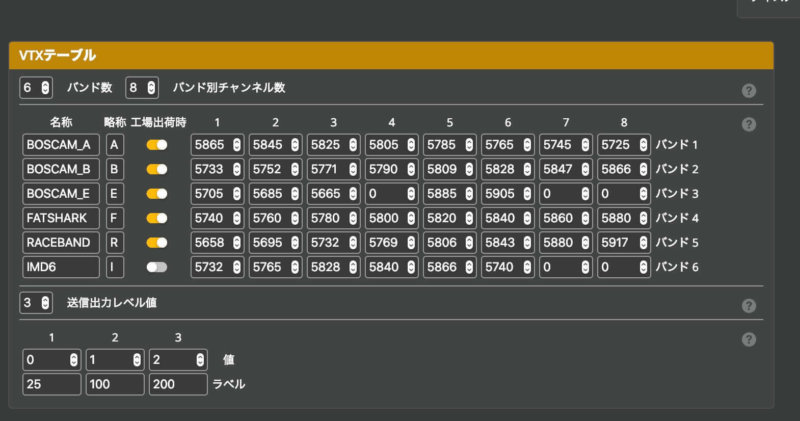
VTXテーブルはデフォルトで入っているので、とくに変更せずと思ったら、最大VTX出力はこのドローンは100mWですが、200mWまで入っていますね。
なので出力だけ変更。
PID
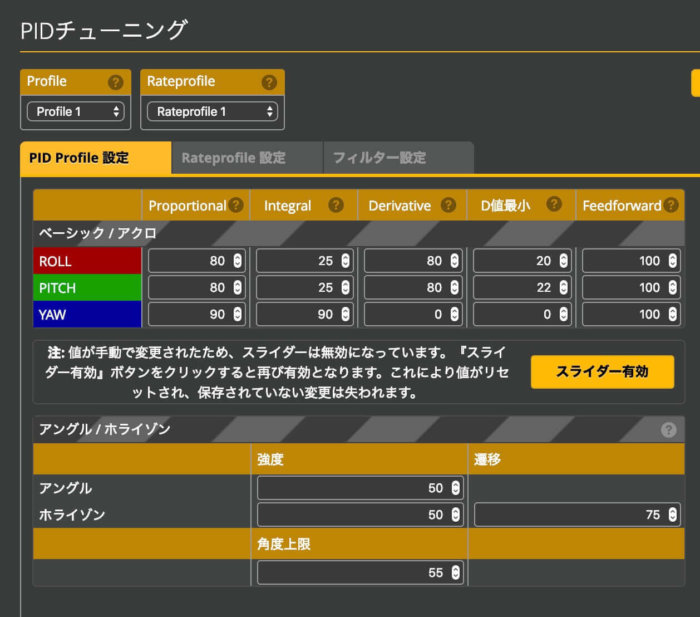
PIDはこんな感じの値が入っていました。
自分はスライダー有効にして、ぜんぶ中心の値に変更。
RATE
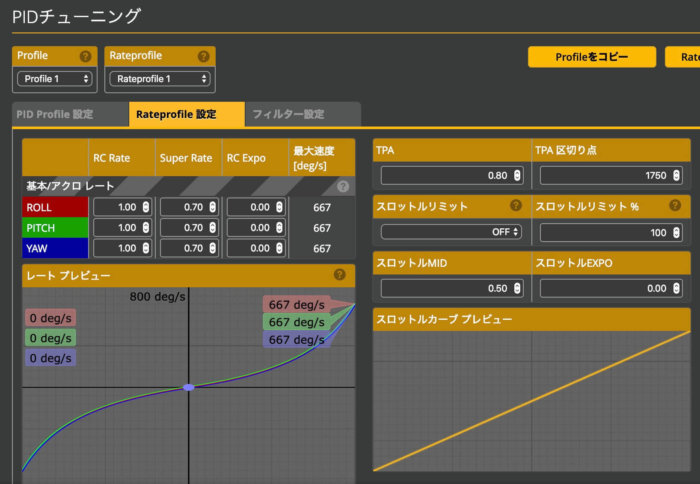
RATEのデフォルトの値はこんな感じ。
自分は下の値に変更。
1.98 0.64 0.21
1.98 0.64 0.21
1.65 0.64 0.21
OSD
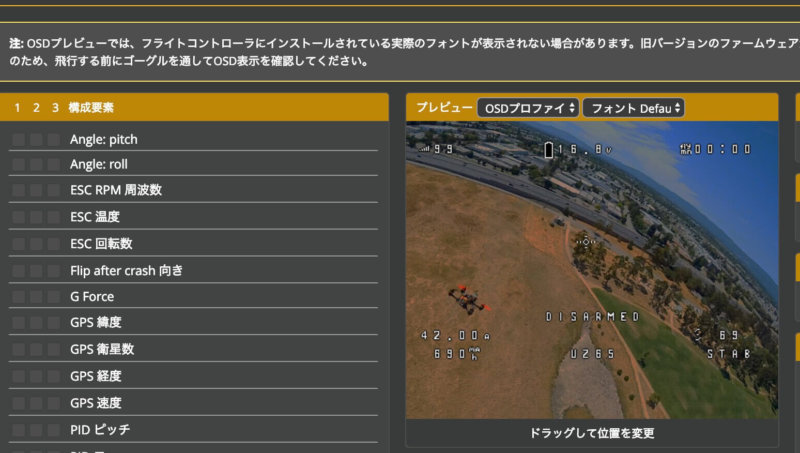
OSDのデフォルト値はこんな感じ。
これはお好みで設定すればいいと思います。
bind
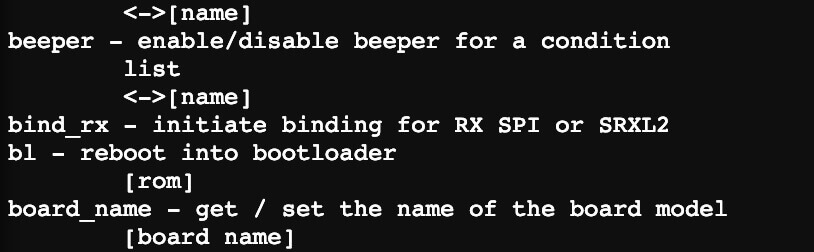
バインド方法はCLIコマンドラインから可能。
「help」と入力してエンターを押せば、バインド待ちにするためのコマンドが出てきます。
この機体の場合(ベータフライト のバージョンによって違います。最近のは下のコマンド)
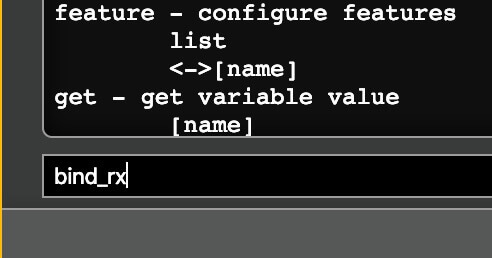
bind_rx
と入力すると上の画像のようにバインド待ちになります。
あとはFutabaの送信機の場合電源が入っていて、送信機側の通信方式を「S-FHSS」に自動でバインドされます(T10J送信機、他の送信機でもFUTABAならたぶん同じだと思います)。

バインド後、受信機タブが、AETRになっていないのでFUTABやFrsky」ならAETRに変更。
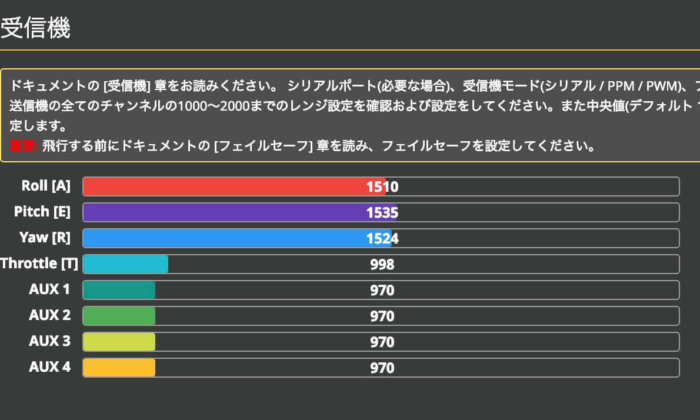
AETRに戻せば、スティックの値が正常になります。
逆の場合は送信機側で「リバース」をかけます。
モードタブ
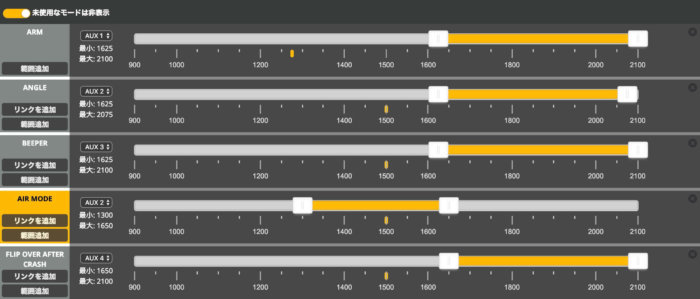
モードタブはこのように変更。
Eachine UZ65 65mm ドローン の特徴
そのほか、かんたんに「Eachine UZ65 65mm」の特徴を紹介。
重量が軽い

Mobula6よりは1gくらい重量が重いようですがほぼ一緒の「21.5g」という軽さ。
レビューしている方のフライト時間をみると、3分以上は余裕でいけるみたいでMobula6より燃費がいいみたいです。
カメラの角度は変更可能

カメラの横にネジがあるので、カメラ角度は調整できます。
「Eachine UZ65 65mm」フライトレビュー
屋外でAirモードで飛ばしていたら、あやまってアスファルトに落としてしまいダクトが破損。
少しモーターがブラブラしながら室内で飛ばした動画です。
3分以上は飛びます。
アングルモードですが、ダクト破損してもそこそこ飛ばしやすかったです。
Eachine UZ65 フレーム交換

フレームがこのように割れてしまったので「Meteor65」のフレームと交換することに。
※UZ65のフレームは65mmでも少しダクト部分が大きくなっているので、機体本体を買うなら一緒に2個ぐらい買っておくといいかもしれません。


ペラとネジを外せばこのように、まとめてはずれます。

あとはMeteor65のフレームで組むだけ。

重量は21.47gでした。
問題点としては、フレームが違うので、

裏側のUSBの差込口とフレームがかぶってしまうことと、UZ65についているデフォルトのペラはサイズが大きくて使えません。
USBの差込口は、ちょっと変形させれば差し込めそう。
Meteor65のフレームに変えて飛ばしてきました。フレームとペラを変えても、自分には違いがわかりませんでした(笑)
スロットル強めに入れて飛ばしても3分はいけるので、燃費はモブラよりはやっぱりいいですね。
まとめ
Eachine UZ65 65mm。
65mmフープはモブラ6が一番お気に入りでしたが「Eachine UZ65」もなかなか良いですね。
ただ、モーターがコネクタ式だったらもっとよかった。
なので、今のところは個人的には「Mobula6」の方が好きかな。
Mobula6のレビュー記事はこちら↓

Eachineから発売されているドローンは下の記事でまとめています↓




