
今回はマイクロドローン「Happymodel Mobula7 HD」の実機レビューをしていきます。
最近はやりのtiny whoop(タイニーフープ)系のマイクロドローンです。
[chat face="11146300_829255030487043_8656104725865386532_n.jpg" name="AKIRA" align="left" border="gray" bg="none"]話はかわりますが、ダウンタウンの「ガキの使いやあらへんで!」でライセンスの藤原さんがマイクロドローンのFPV飛行でミュージックビデオを作る企画をやっていましたね。2週間練習して挑戦するという企画だったのですが、なかなか面白いものに仕上がってました。そこで登場するドローンも今回の記事で紹介するようなマイクロドローンを使用していましたね。たぶんカメラは今回紹介するドローンの「CADDX Turtle V2」か「RunCam Split Mini 2 」のどちらかでしょう。[/chat]
banggoodの商品詳細ページはこちら↓

その他におすすめしたいマイクロドローンは下の記事で紹介しています↓↓

マイクロドローンに必須な5.8Ghz FPVゴーグルは下の記事で紹介してます↓↓

Happymodel Mobula7 HD
| カメラ | CADDX Turtle V2 イメージセンサー:1 / 2.7" CMOSセンサー 水平:800TVL TVシステム:NTSC / PALに変更 ビデオ解像度:1080P @ 60fpsのの/ 1080P @ 30fpsの/ 720 @ 60fpsの 電源入力:DC 4.5-20V FPV FOV:155° 録音FOV:170° マイクロSD:8~64GB |
|---|---|
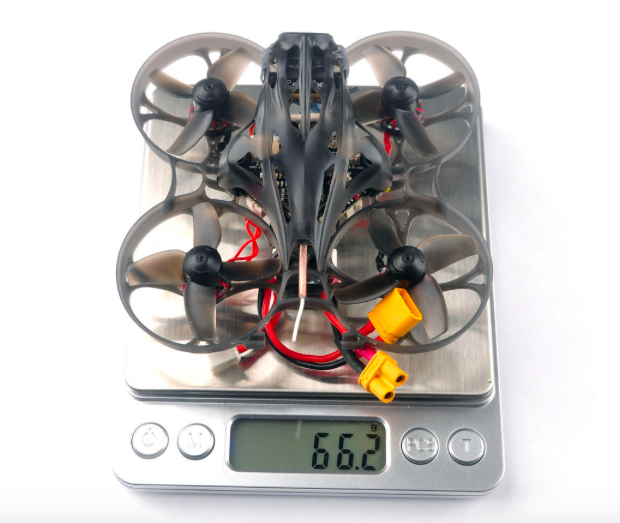
| 重量 | 48g(バッテリー含まず) |
| フレーム | ホイールベース75mm |
| モーター | EX1102 10000KVモーター |
| レシーバー | Frsky/Flysky/DSM2 / DSMXなど選択可能 |
| 価格 | 18000円前後(2019年3月現在) |
Happymodel Mobula7 HD セット内容

- Mobula7のHDの75ミリメートルFPVドローン×1
- 40ミリメートル3ブレードプロペラ(4 CWおよびCCW 4)×4
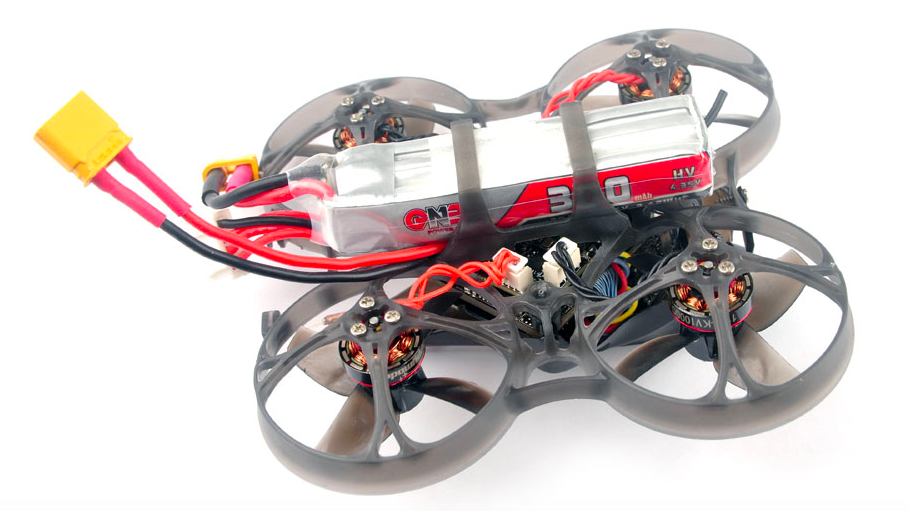
- 3S 11.4V 300mah 1×30C / 60Cのバッテリー×1
- プロペラを分解ツール×1
- ドライバー×1
Happymodel Mobula7 HD の特徴・レビュー

もう画像はブザーがついているものになってしまっていますが、、、、VTXの追加申請手続きをしている間に取り付けてしまいました。
ちなみにこちらのVTXの系統図は「一般社団法人日本ドローン無線協会」会長さんの戸澤さんのところで1080円で入手可能です。
「woop_vtx」という名称のものになります。
詳しくはこちらの記事で紹介しています↓↓

搭載しているVTXは「Whoop_VTX」

搭載しているVTXは「Whoop_VTX 200mw」です。
上にも書きましたが戸澤さんのところで入手可能ですので、純正のもので開局申請が可能です。
かなり燃費のいいFHDドローン

今まで何台かFHDのマイクロドローンを飛ばしてきましたが、いちばん燃費のよいFHDマイクロドローンです。
正確に測ってはいませんが「2s 300mah」で4分ぐらいは普通にいけます。
その他のFHD機は3分以下ですので、燃費の良さを考えるとかなりおすすめ。
アクロバット飛行は若干重たくてもっさりしている

変な表現をしていますが、フリップなどのアクロバット飛行はちょっと苦手なマイクロドローンのようです。
バッテリーを3sでも挑戦してみましたが、少し重たくてバランスを崩す印象です。
まぁできないわけではありませんが、どちらかというと燃費もいいしFHDでの空撮を楽しむマイクロドローンといった感じですかね。
カメラはCADDX Turtle V2
カメラはCADDX Turtle V2です。
最近の中華系のFHDマイクロドローンにはおなじみのカメラですね。
ESC
MCU upgraded to EFM8BB21
Power supply: 1-3S LiPo/LiPo HV (3.5v/13v)
Current: 5A continuous peak 6A (5 seconds)
Support BLHeliSuite programmable
Factory firmware: S_H_50_REV16_7.Hex
Default protocol: DSHOT600
ESCの情報はこんな感じ。
Flight Controller
Item Name: Crazybee F4 Pro V2 FC
MCU: STM32F411CEU6 (100MHZ, 512K FLASH)
Sensor: MPU-6000(SPI connection)
Board size: 28.5 * 28.5MM
Power supply: 1-3S battery input (DC 3.5-13V)
Built-in 5A(each) Blheli_S 4in1 ESC Dshot600 ready
Built-in Receiver ( Diffirent version having diffirent receiver,
without receiver version doesn't have rx)
Built-in Betaflight OSD(SPI Control)
Built-in Current meter Max 28A
Current meter scale set to 1175
Built-in 5V 1A Buck / Boost with LC filter
Built-in voltage detection
Firmware
(Frsky version) CRAZYBEE F4FR PRO V2.0 Firmware target: CrazybeeF4FR
(Flysky version) CRAZYBEE F4FS PRO V2.0 Firmware target: CrazybeeF4FS
(DSM2/DSMX version) CRAZYBEE F4DX PRO V2.0 Firmware target: CrazybeeF4DX
(No RX version) CRAZYBEE F4 PRO V2.0 Firmware target: CrazybeeF4DX
フライトコントローラーの情報はこんな感じです。
Happymodel Mobula7 HD 送信機とのバインド
説明書にはCLIコマンドラインにて「bind」と入力すると書いてありましたが、うまくバインドできませんでした。
自分は「bind_rx_spi」と入力したところbind待ちになり、あとは送信機でbindボタンを押してバインドさせました。
Happymodel Mobula7 HDの外観



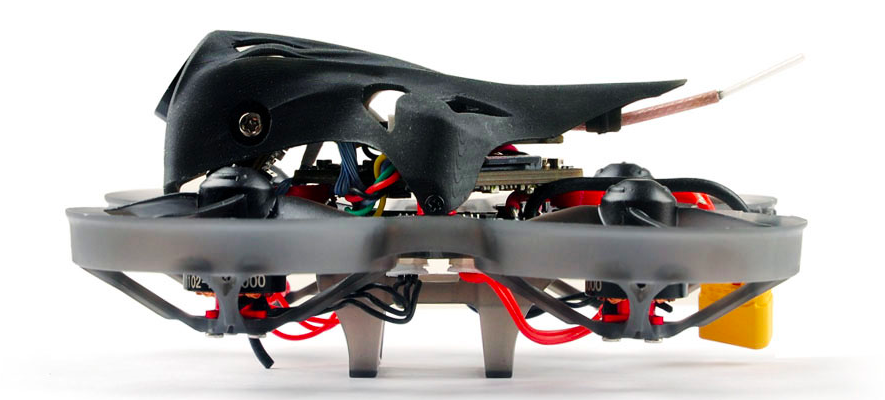


外観はこんな感じですね。
カッコいい!!
youtubeでのレビュー動画
こちらはのyoutube動画は自分が飛ばしているものです。かなりへたくそですが、360°フリップなどもやっています。
たぶんもっさりとして感じが伝わるかも。
最後に
Happymodel Mobula7は燃費がよくて、空撮機として使用するにはとてもおすすめできるマイクロドローンです。
気になる方は海外通販サイトbanggoodでチェックしてみてください。
banggoodの商品詳細ページはこちら↓
海外通販サイトが始めてで購入方法がわからない方は下の記事も参考にしてください↓
diff all 初期値の情報(バックアップ)
# version
# Betaflight / CRAZYBEEF4FR (C4FR) 4.0.0 Dec 11 2018 / 01:44:17 (3b479f92d) MSP API: 1.41
board_name CRAZYBEEF4FR
manufacturer_id
mcu_id 004600293237511730353639
signature
# reset configuration to default settings
defaults nosave
# name
name Mobula7 HD
# resources
resource PWM 1 D07
resource PWM 3 D11
resource PWM 5 D10
resource PWM 6 A11
resource PWM 7 F08
# mixer
# servo
# servo mix
# feature
feature -TELEMETRY
feature MOTOR_STOP
feature LED_STRIP
# beeper
# beacon
# map
# serial
serial 0 2048 115200 57600 0 115200
serial 1 2048 115200 57600 0 115200
# led
led 0 4,7::CO:2
led 1 5,7::CO:2
led 2 6,7::CO:2
led 3 7,7::CO:2
led 4 8,7::CO:2
# color
# mode_color
# aux
aux 0 0 0 1725 2100 0 0
aux 1 1 1 1725 2100 0 0
aux 2 13 2 1750 2075 0 0
aux 3 28 1 1300 1700 0 0
# adjrange
# rxrange
# vtx
# rxfail
# master
set serialrx_provider = SBUS
set rx_spi_protocol = FRSKY_D
set motor_pwm_protocol = DSHOT600
set vbat_min_cell_voltage = 31
set vbat_warning_cell_voltage = 32
set ibata_scale = 1175
set small_angle = 180
set pid_process_denom = 1
set osd_warn_esc_fail = OFF
set osd_vbat_pos = 2091
set osd_rssi_pos = 2081
set osd_tim_1_pos = 54
set osd_tim_2_pos = 2102
set osd_flymode_pos = 2456
set osd_g_force_pos = 65
set osd_throttle_pos = 2423
set osd_current_pos = 2400
set osd_mah_drawn_pos = 2433
set osd_craft_name_pos = 2442
set osd_warnings_pos = 329
set osd_disarmed_pos = 2346
set vtx_band = 3
set vtx_power = 2
set vtx_freq = 5705
set frsky_spi_tx_id = 49,107
set frsky_spi_offset = -13
set frsky_spi_bind_hop_data = 0,30,60,91,120,150,180,210,5,35,65,95,125,155,185,215,10,40,70,100,130,160,190,221,15,45,75,105,135,165,195,225,20,50,80,110,140,170,200,230,25,55,85,115,145,175,205,0,0,0
# profile
profile 0
set d_pitch = 30
set p_roll = 50
set d_roll = 27
set p_yaw = 72
set i_yaw = 55
# profile
profile 1
# profile
profile 2
# restore original profile selection
profile 0
# rateprofile
rateprofile 0
set roll_expo = 23
set pitch_expo = 23
set roll_srate = 75
set pitch_srate = 75
# rateprofile
rateprofile 1
# rateprofile
rateprofile 2
# rateprofile
rateprofile 3
# rateprofile
rateprofile 4
# rateprofile
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save



