
今回は「HGLRC」の「FD413」FCとESCのセットのレビューと、それで自作のToothpick機を作ってみましたので、パーツやセッティングなどを紹介します。まぁセッティングといっても、たいしたもんじゃぁ〜ありませんけど。
詳しい人が読んだら、「当たり前だろ!!」って言われてしまいそうな内容ですけど。
こちらのFC、ESCのセットを使っています↓↓16mm×16mmで配線で接続するタイプのタワーです。

【HGLRC FD413 16mm×16mm FC,ESCレビュー 】自作ドローンToothpick機を作ってみました

こちらは外箱。
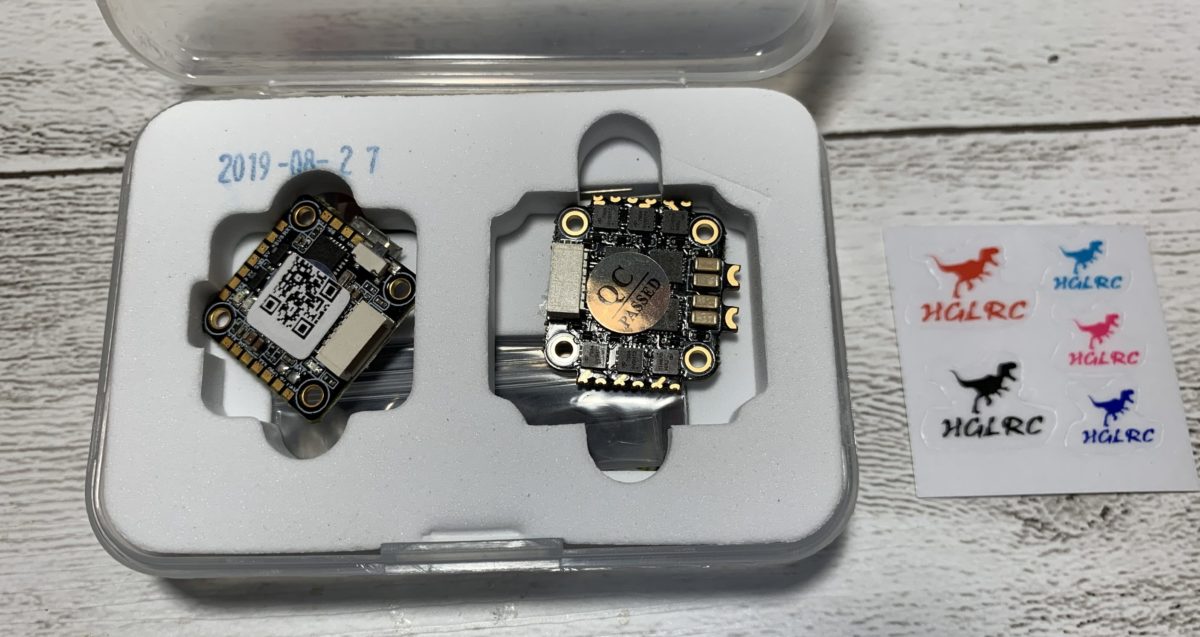
左側がFC、右側がESC.
シール付き。使わないけどwww
なにげにHGLRCの恐竜シールがたまってきてる。

付属品はこんな感じ。

機体のフレームはこいつを利用します。
オークションでFCが壊れているジャンク品で購入した、「iFlight Tabobi 120RS」です。
本来ならこちらのToothpickはタワーが全部ピンコネクタでとまっていて、VTXまで一体型なんで、これ用のを購入すれば簡単に修理できてしまうんですけど、やっぱりVTXは開局しているものを使用したいですからね。
そこでFCを何にしようか探していたのですが、ネジ穴が16mm×16mmで、ピン型じゃなく配線のFCってあまりないんですね。
もう選択肢がないって感じで、16mm×16mmで4s対応で配線型の「GLRC FD413」に変更することにしました。

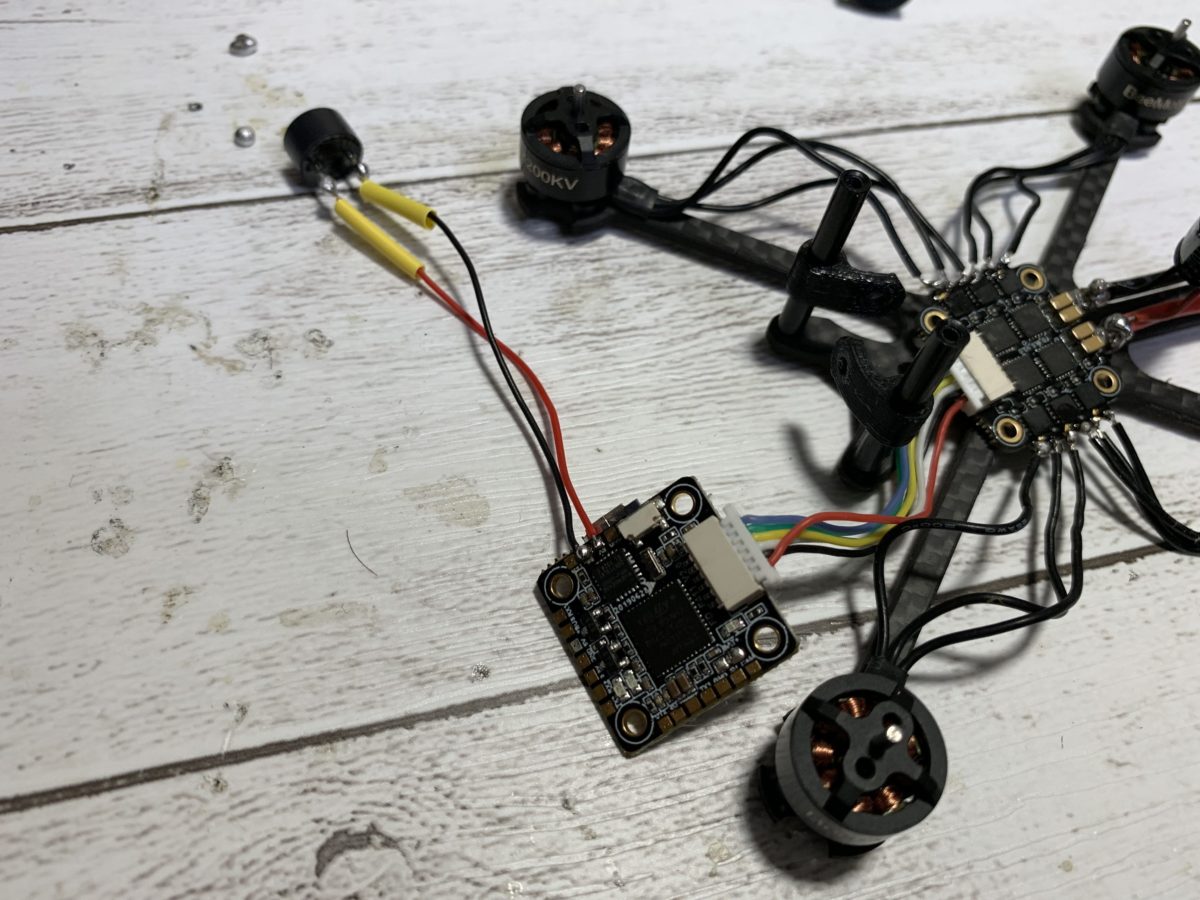
とりあえず、分解していって、
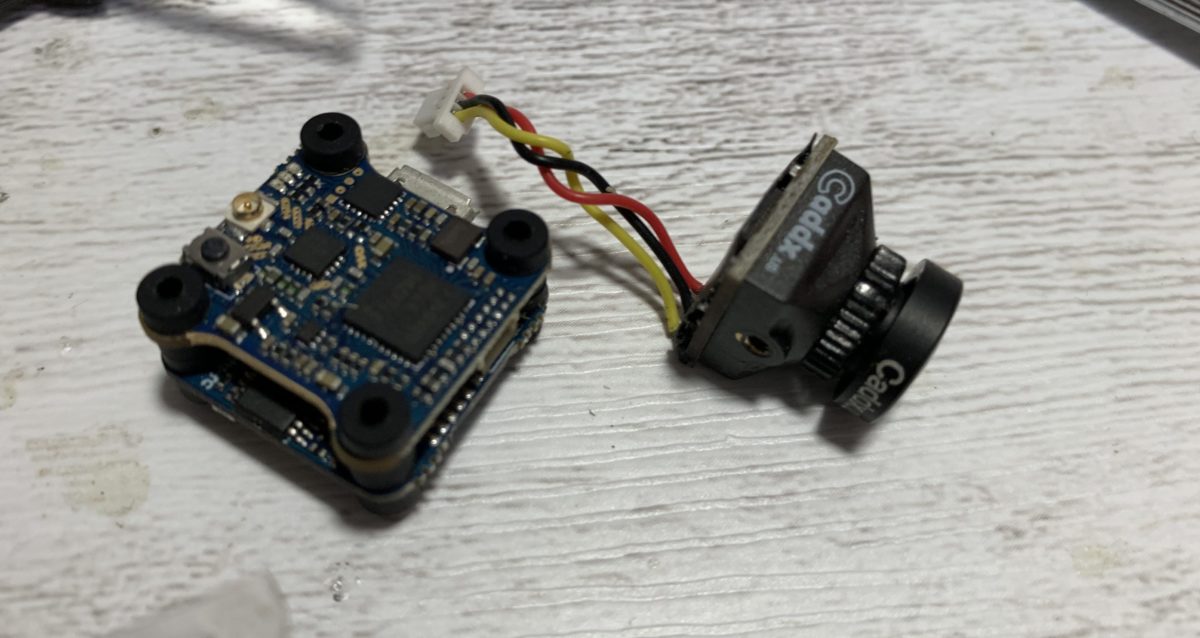
カメラはこの14mmのやつを使います。
おそらくESCは壊れていない気もするのですが、ピン型ですので利用できず、、、

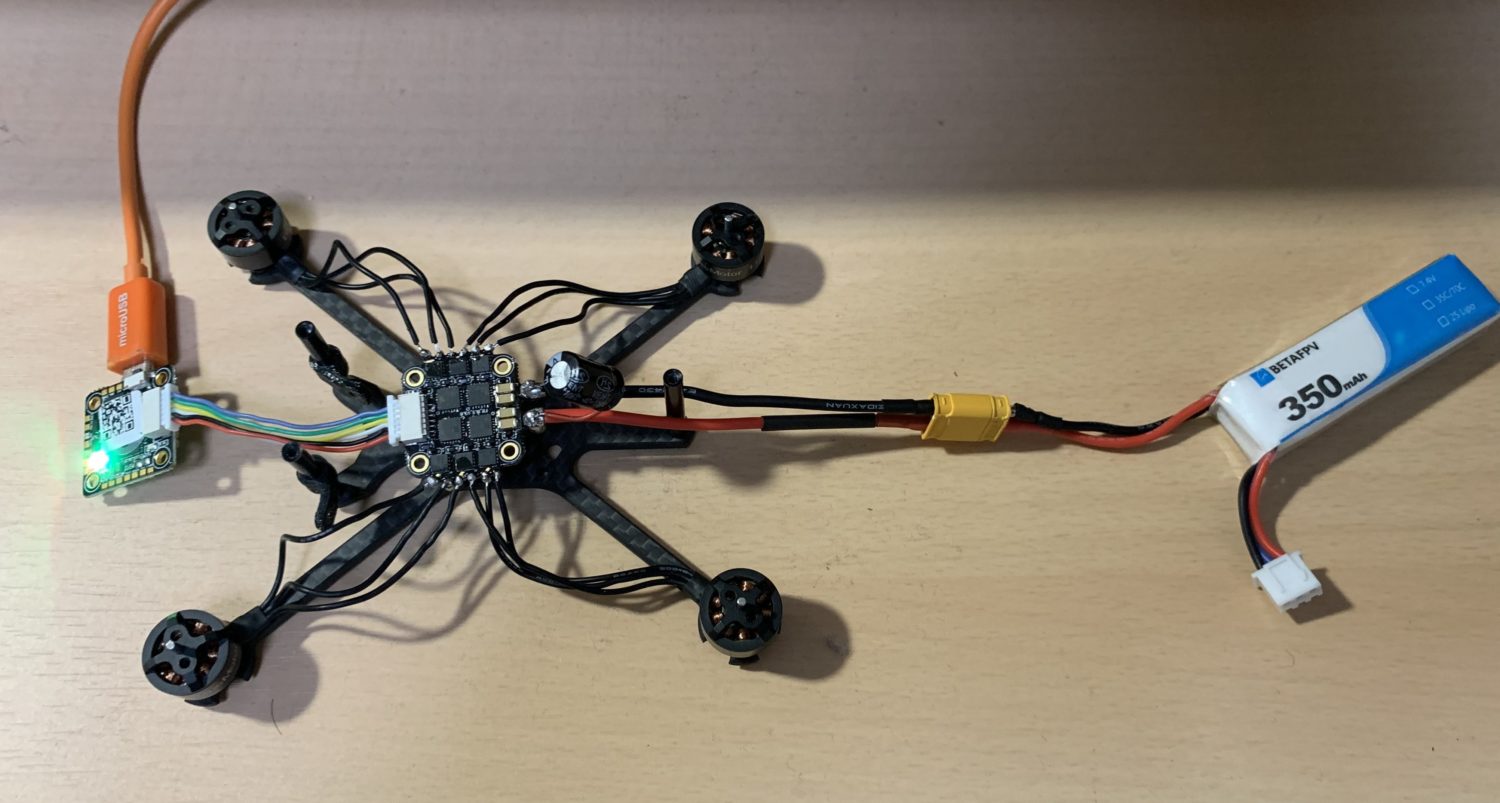
とりあえずフレームとカメラとモーターとペラを使うことにします。
HGLRC FD413 組み立て
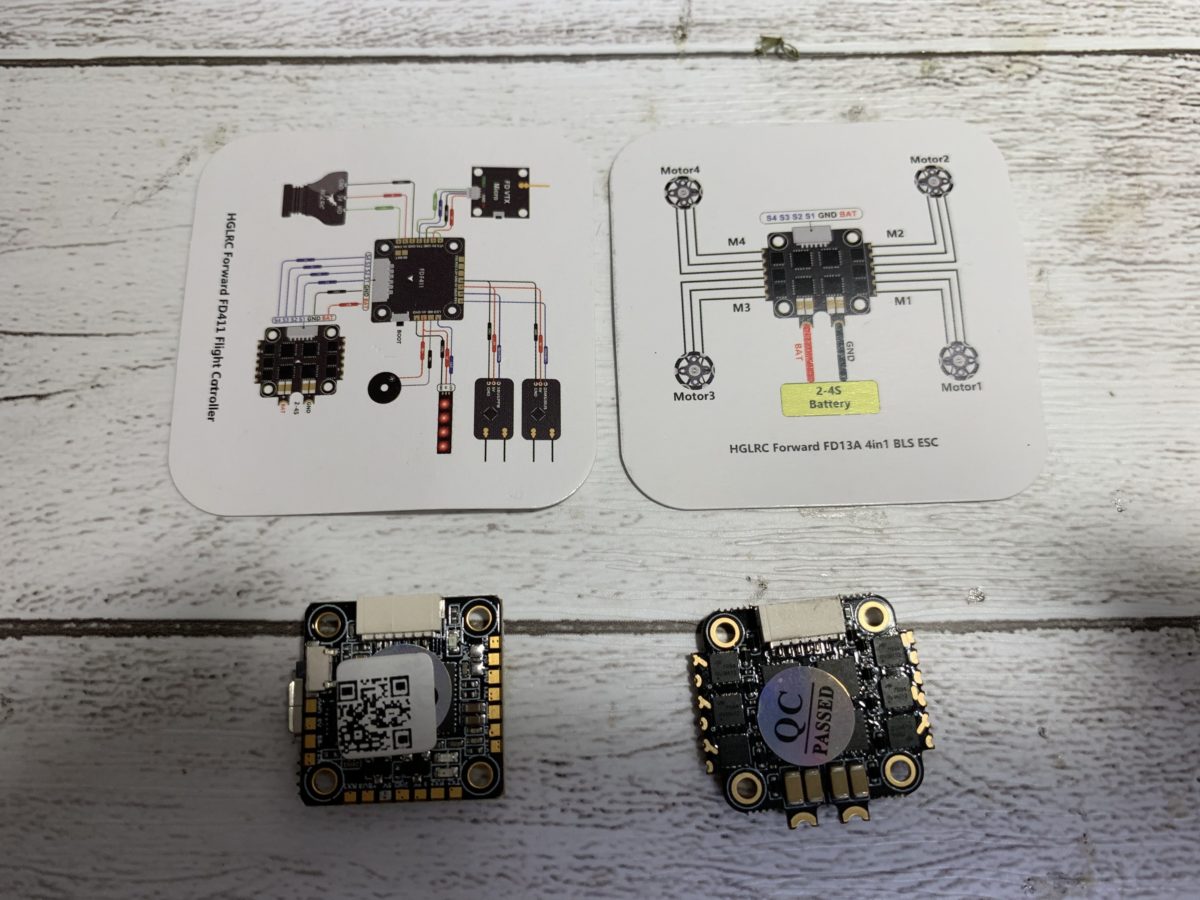
FCとESCの向きを確認。
機体の先端が上になるように並べています。
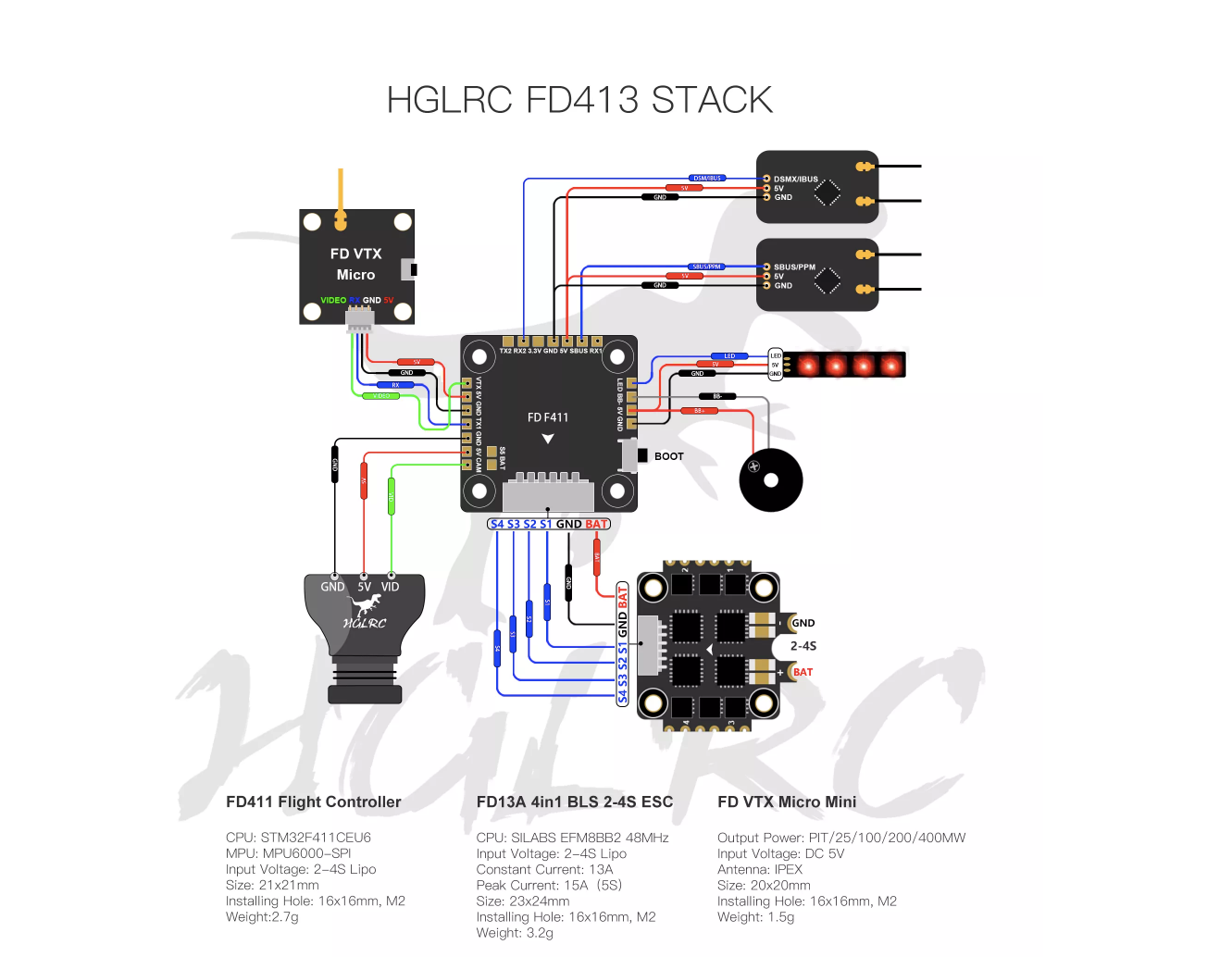
ちなみに「HGLRC FD413」の基盤の回路図はこんな感じです。
詳しく書いてかるのでこれどおりに組んでいけば、OKです。
説明書にも回路図が入っています
ベーターフライトを使って、FCの向きは変更することができます↓↓下の記事で紹介しています

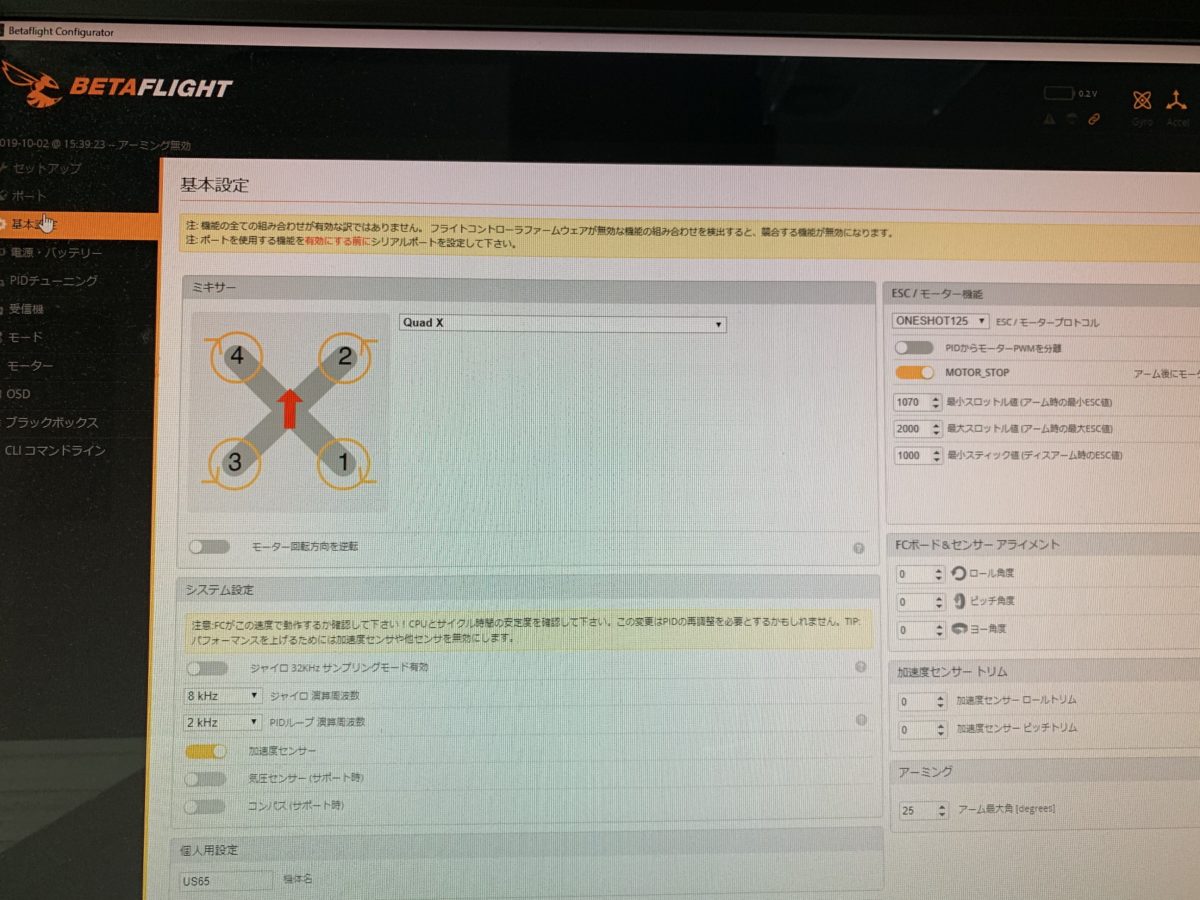
こちらはデフォルトのFCの基本設定の状態。
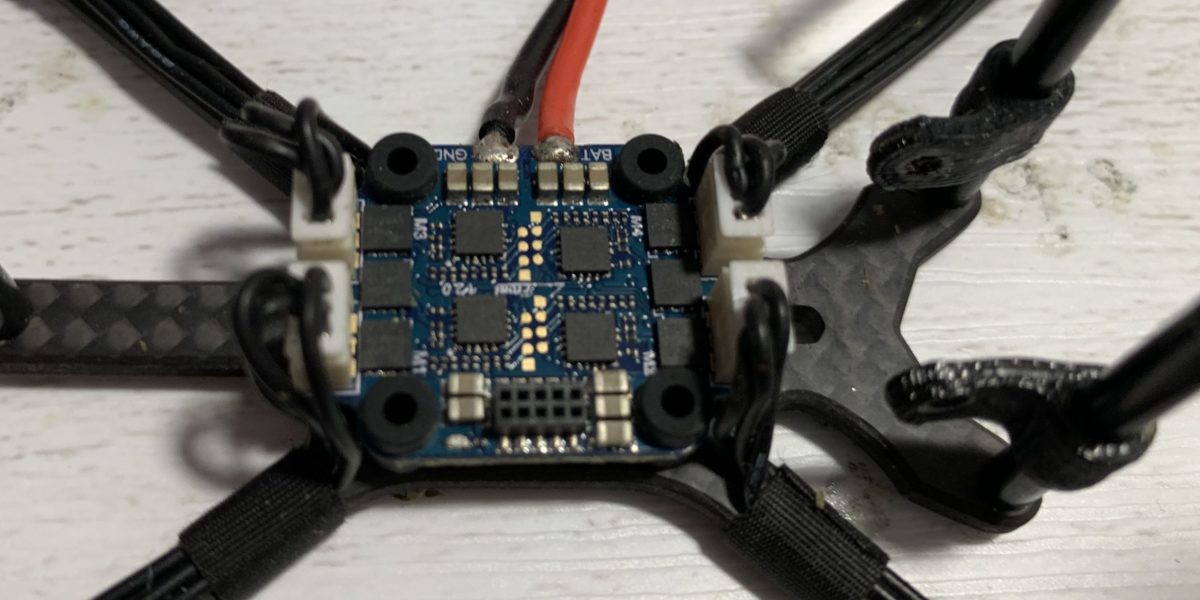
とりあえず電源の配線をハンダつけ。
「HGLRC FD413」付属品としてコンデンサ(キャパシタ?)がついていたので、それもいっしょにハンダつけしました。
電荷を蓄えたり、放出したりする役割のようですが、詳しくはわかっていません。
あったので、つけたって感じwww
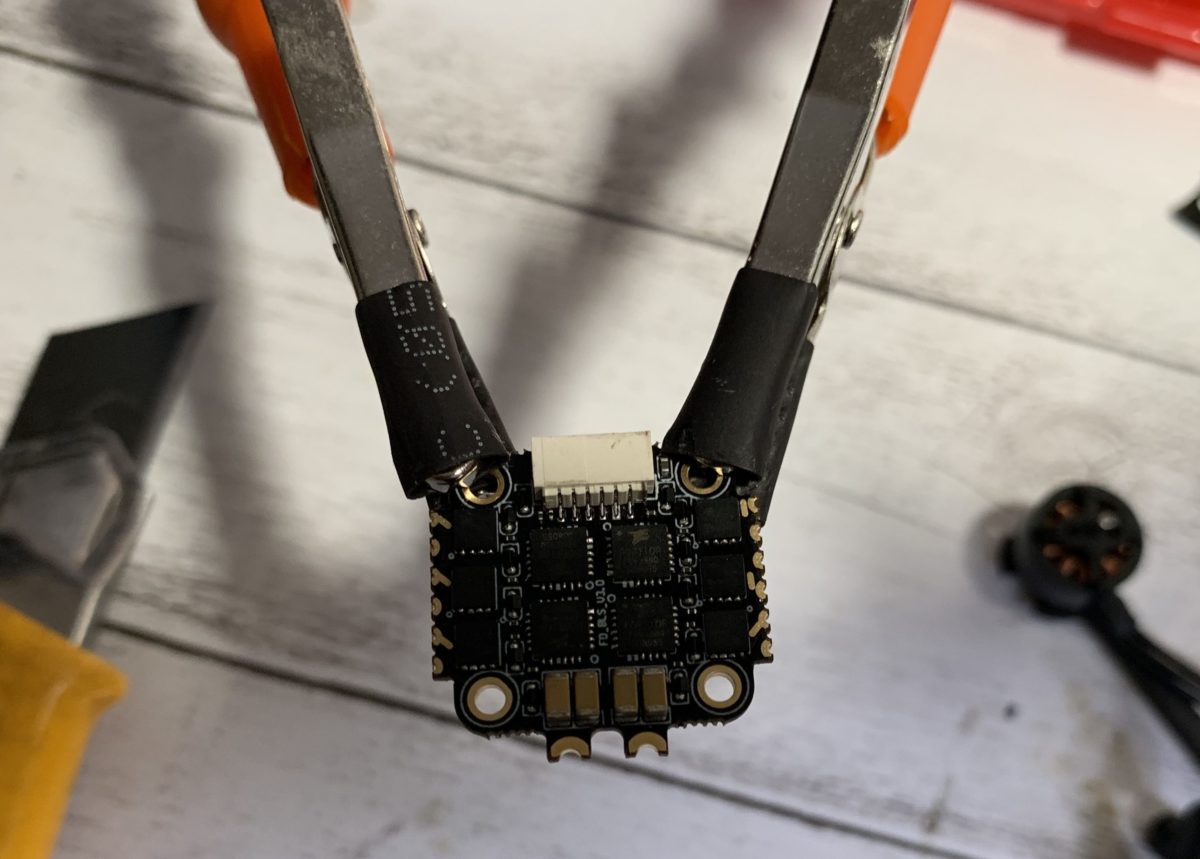
モーターの配線はもともとはコネクタ接続になっていたのですが、こちらの基盤にはハンダでつける必要があります。
ネジ穴16mm×16mmの基盤ですので、かなりピッチがせまくはんだつけが下手くそな自分にはかなり厳しい感じした。
とりあえずなんとか、モーターのはんだつけが終わり、モーターの回転チェックをします。
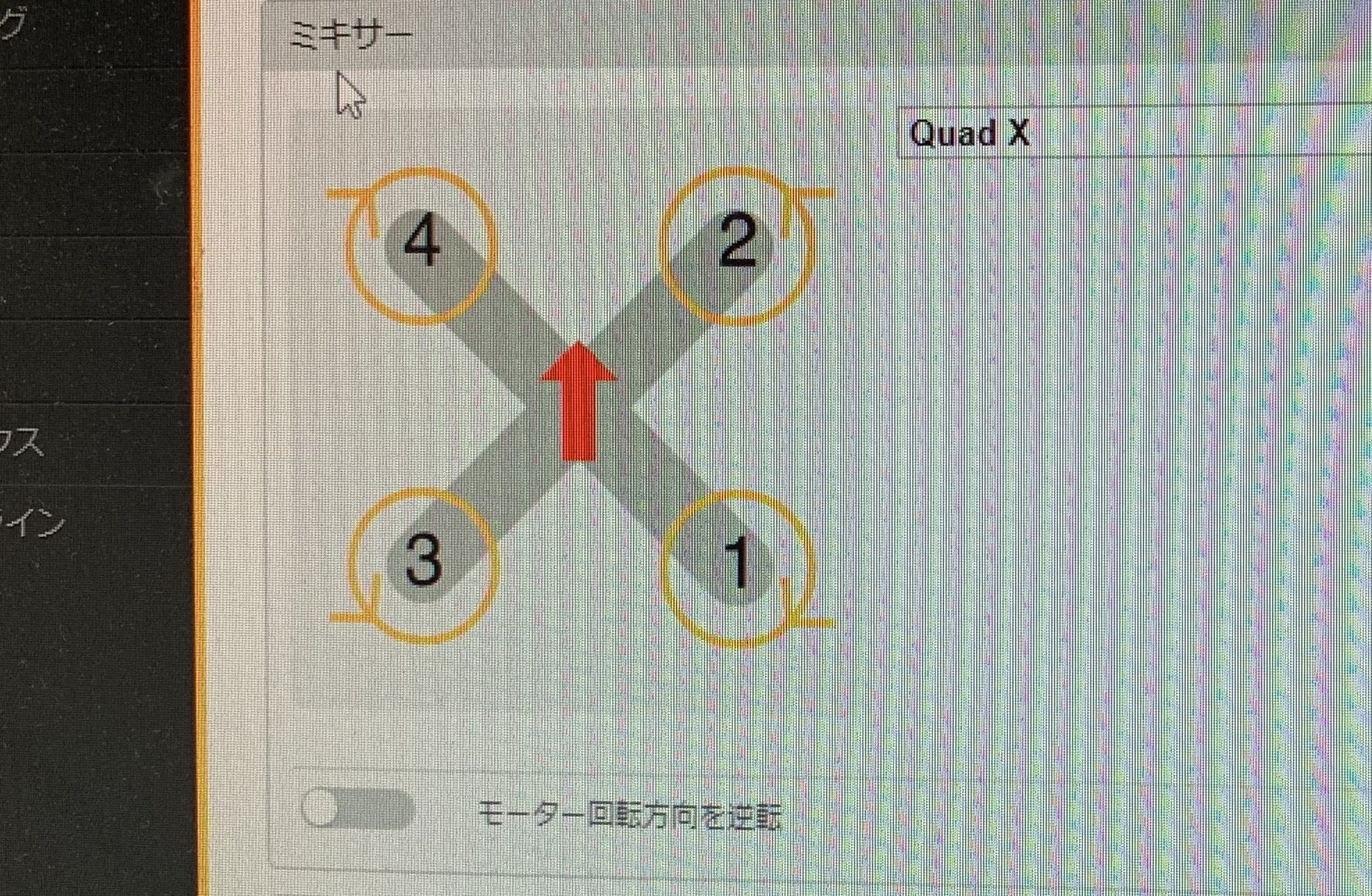
ベータフライトのモーターの回転方向と、実際に回転してる方向があっているかチェック。
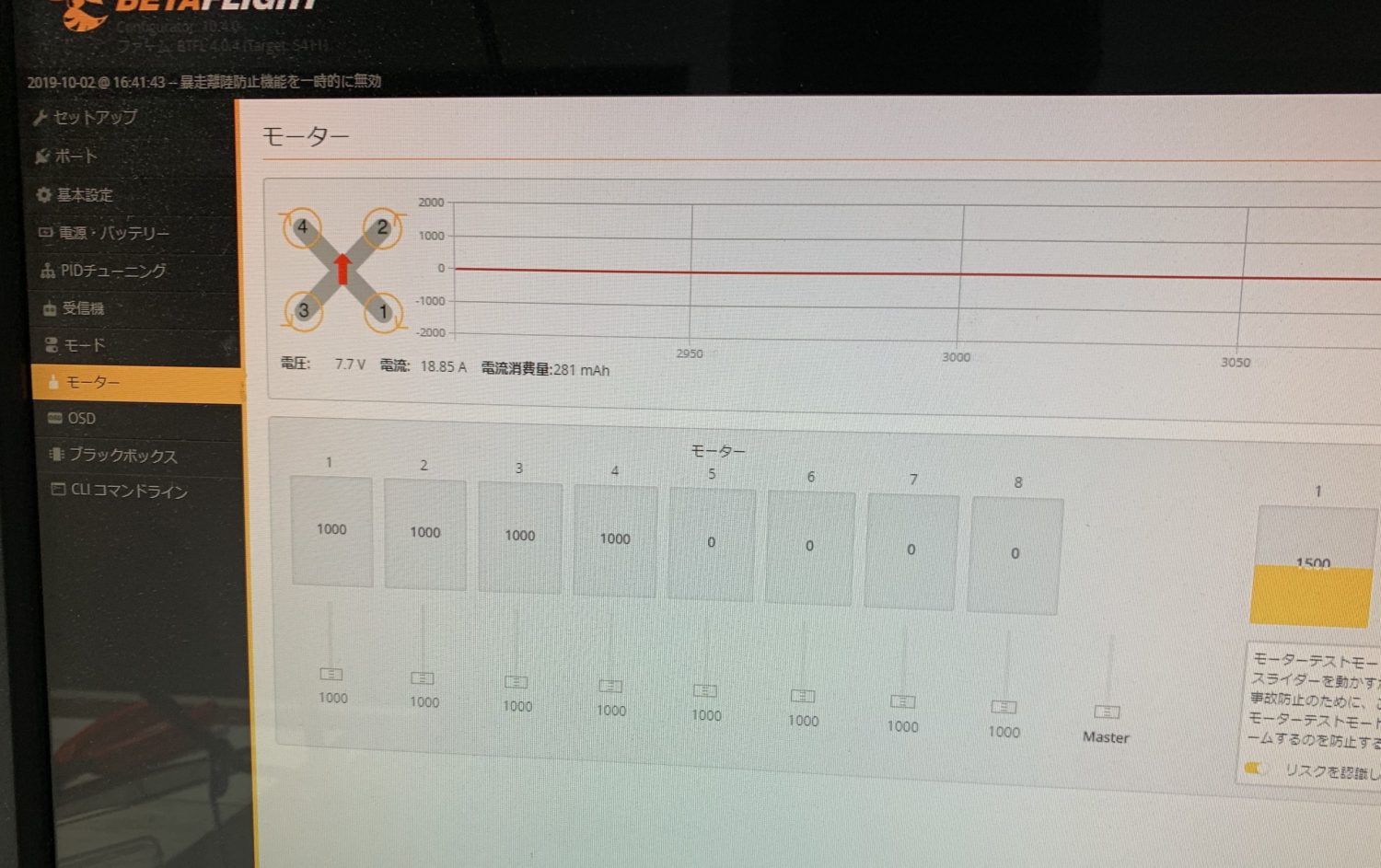
チェック方法はベータフライトのモータータブの、上の画像だと右下の「リスクを理解し、、、、、、、、、、」の部分のチェックを入れ、
1番から4番までのモーターを一個ずつ回転させていき、モーターの回転方向が画像と一緒か確認します。
今回は2番と3番のモーターの回転方向が逆でしたので、「BLHeli Configurator」を使って2番と3番だけ逆に回転するように設定します。そのまま逆回転でドローンを飛ばそうとすると暴れます。
よく「ドローンを飛ばそうとしたら暴れるてしまって飛ばない!!」というのを見かけますが、原因はモーターが逆回転になっているか、プロペラのつけ間違えが多いです。
BLHeli を使ってモーターを逆回転にする
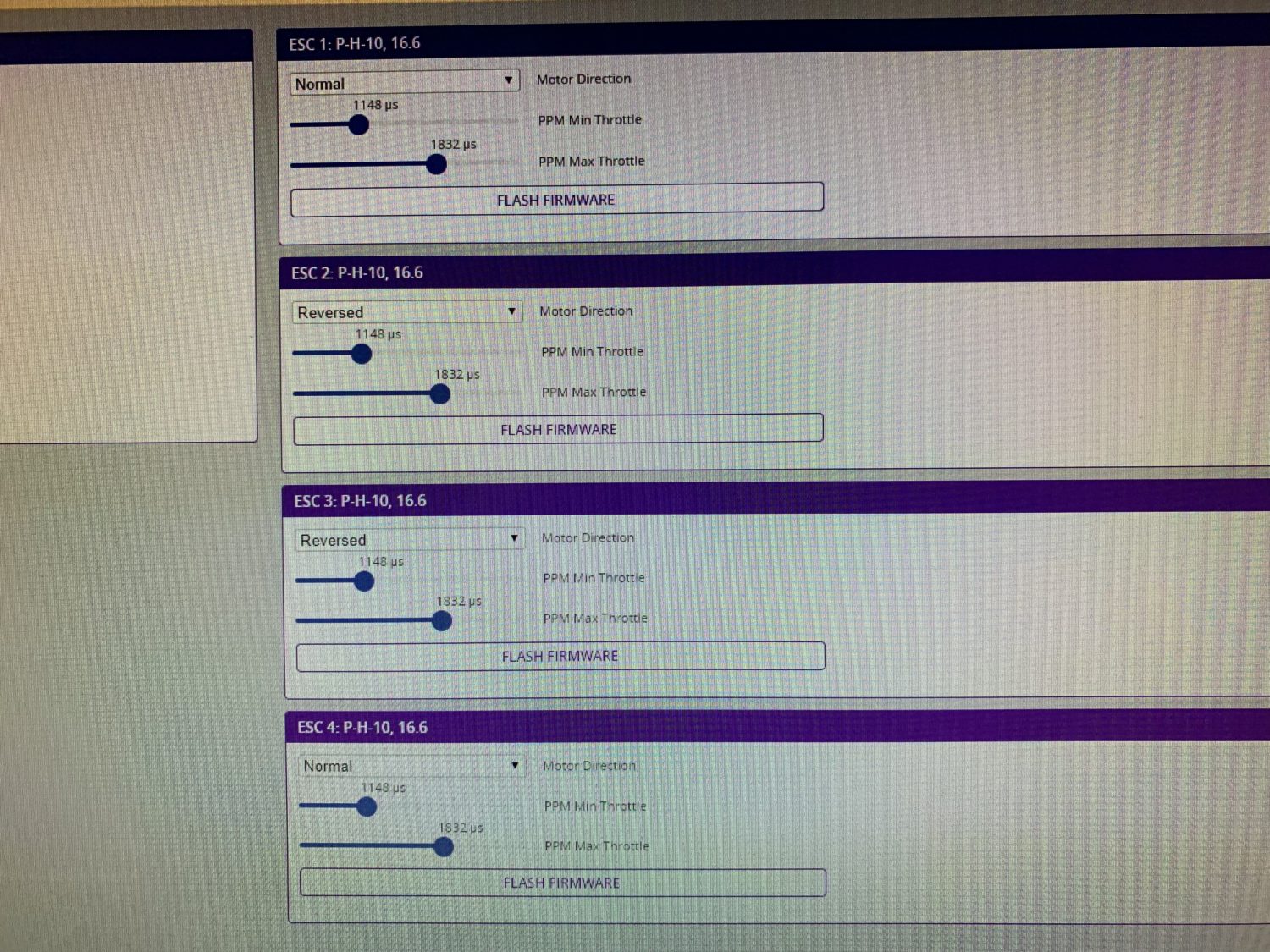
BLHeliを起動し画面右上の「connect」で接続。たしかその後右下の「Leadなんちゃら」で読み込み。
次の画面で2番と3番のモーターの回転方向だけ「Reversed」にしてあげて、「Write setup」をクリックすればモーターが逆に回るようになります。
ブザーの取り付け
ブザーも組み立て時に取り付けてしまいました。
モーターのはんだつけのピッチはかなり狭いですが、それ以外は自分でも許容範囲のピッチですかね。
そこまで厳しくない感じです。
音がなるかもこの時点で確認→OK
カメラの取り付け
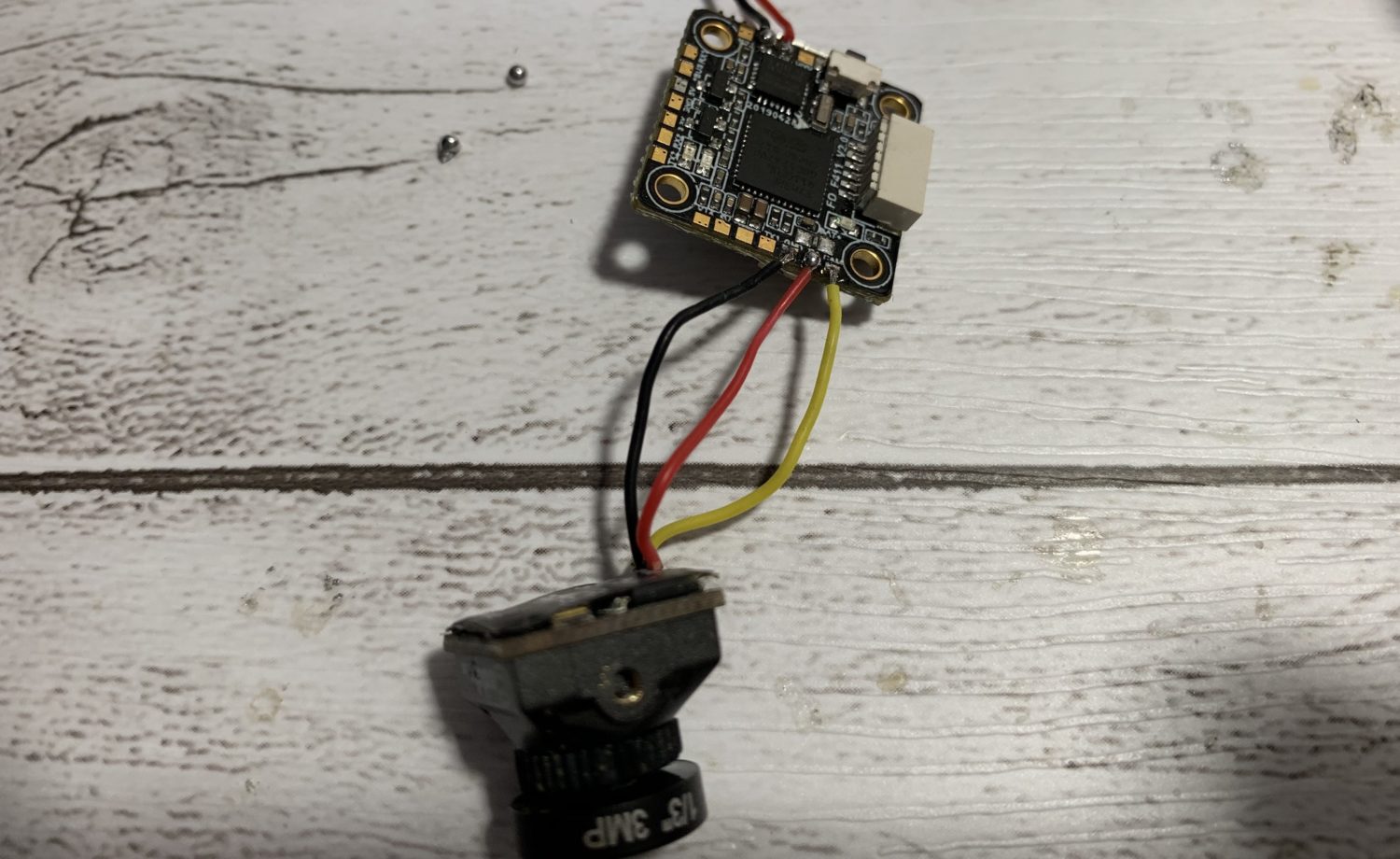
カメラも「iFlight Tabobi 120RS」のを使用。
コネクタ接続だったので、コネクタ手前をカットして、配線を基盤にはんだつけしました。
VTX Runcam TX200
VTXは「Runcam TX200」を使用。
2019年10月4日現在確認したところ「Runcam TX200」は販売が終わってます。
代わりに「Runcam TX200U」というスマートオーディオ対応のものは売っているのですが、戸澤さんのところにある系統図は「Runcam TX200」なので、、、、一緒なのかはわかりません。気になる方は戸澤さんに聞いてみるなり自分で調べてみてください↓↓

とうことなので、ここら辺は現在販売されているもので安いVTXだとEachine VTX03Sあたりがいいかもしれませんね。「Eachine VTX03S」と「Eachine VTX03」は同じ系統図で、戸澤さんのところにあります。
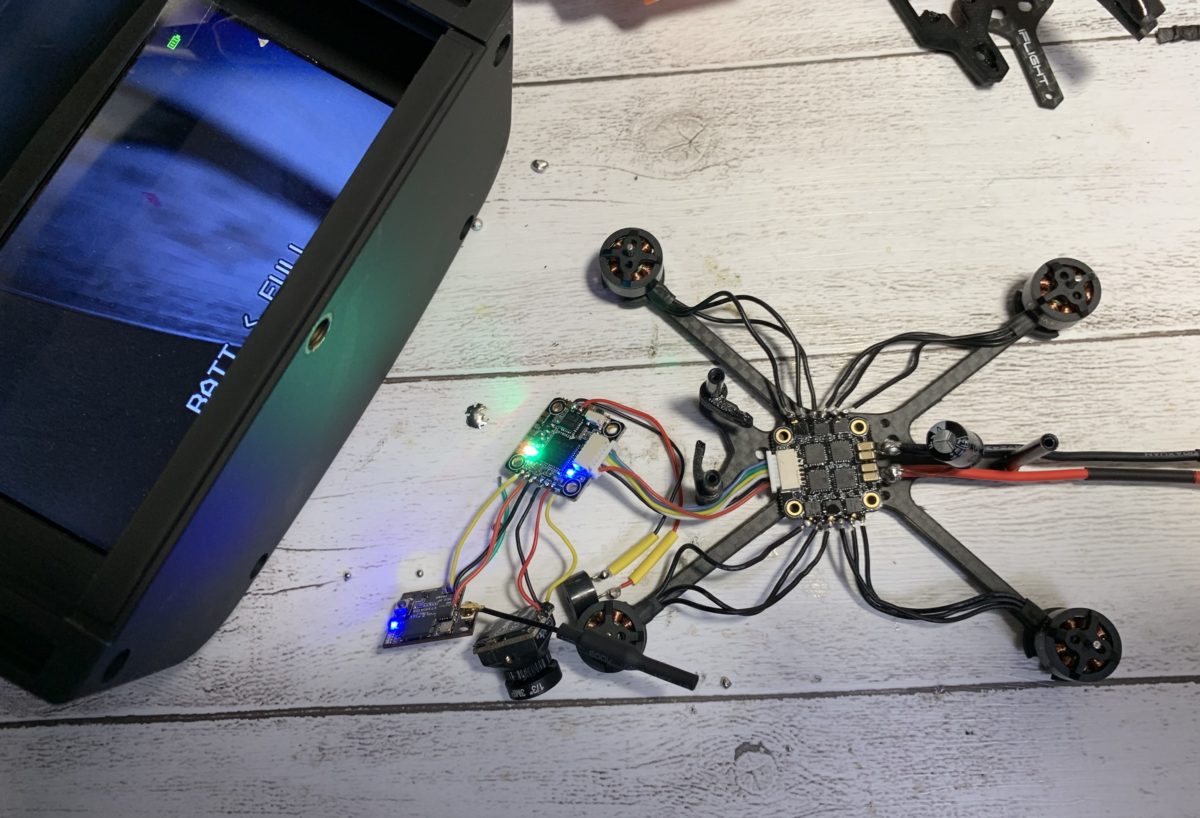
VTXをつけたら、あとはちゃんとカメラの映像が飛んでくるかチェックします。
特に問題なく一発でうまくいきました。
レシーバーの取り付け
最後にレシーバーの取り付けを行いました。
レシーバーは「Frsky XM+」。
これもとりあえずbindして、ベータフライトコンフィギレターでも問題なく動作しましたのでOK。
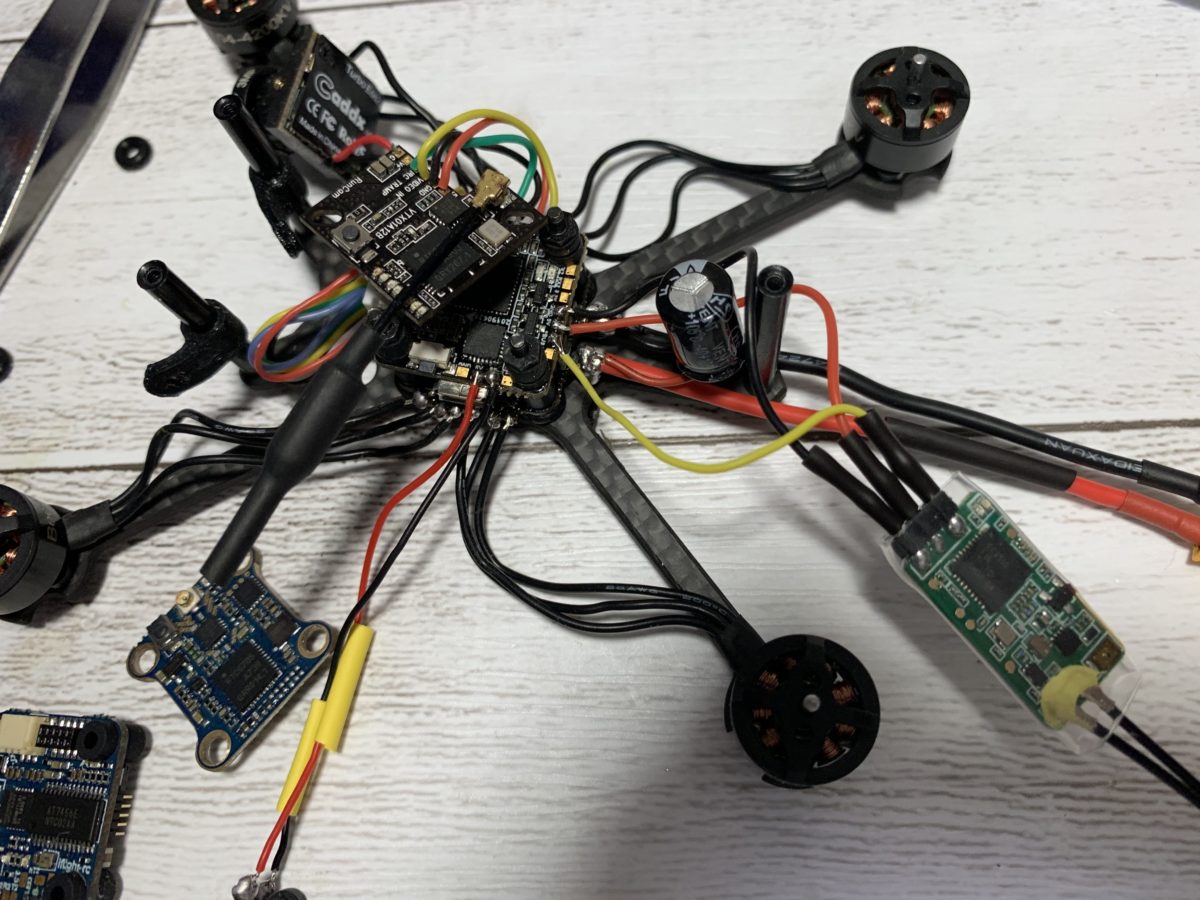
部品の組み立てと、動作の確認ができましたので、

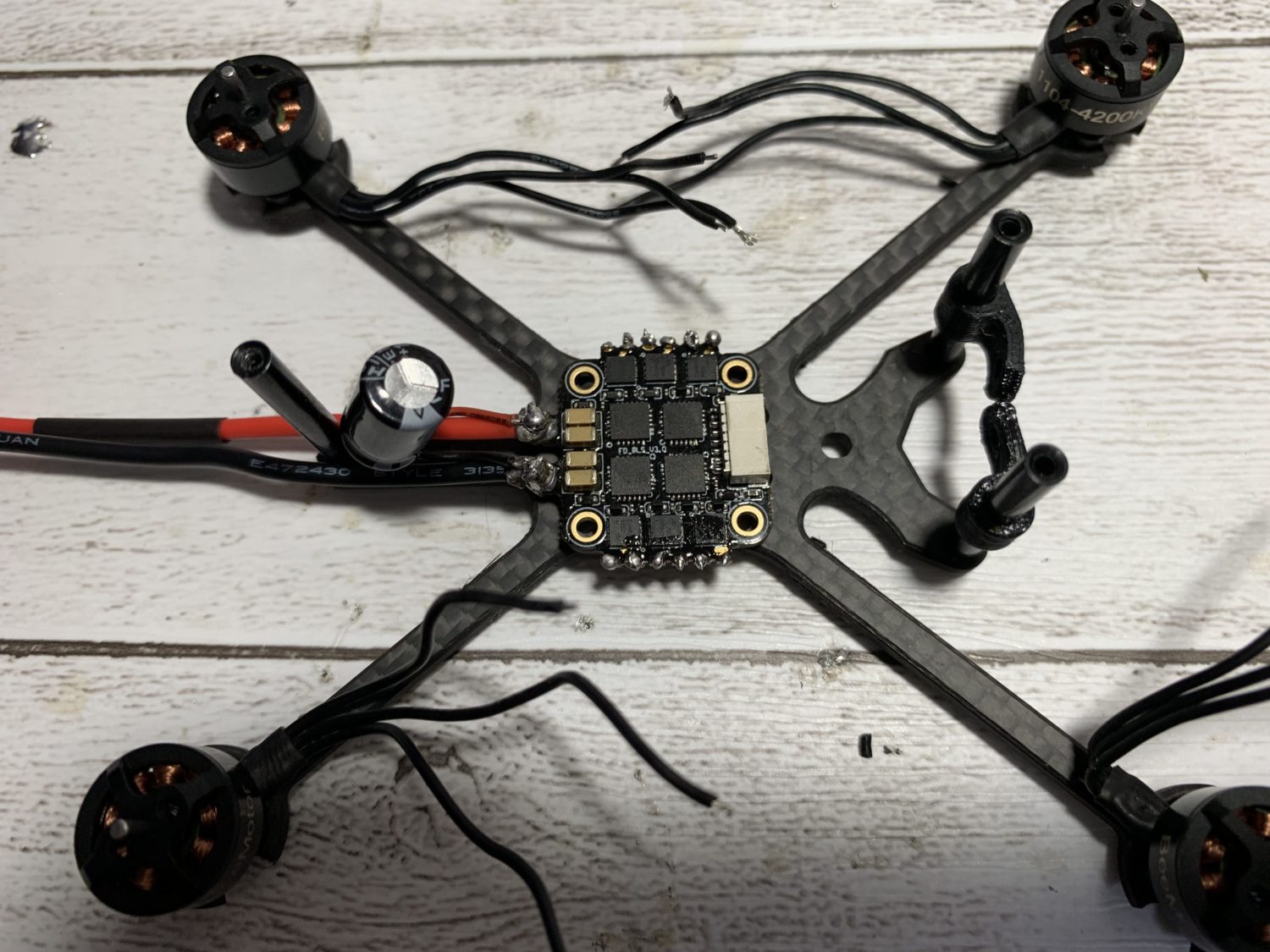
あとは組み上げて終了。
組み立てた機体をみて思ったことは、配線類がごちゃごちゃでてきて、美しくない(笑)
モーターの配線の長さなども、びびりなんであまりカットしないでかなりあまりがあるから綺麗じゃないしwww
とりあえずピン型のFC,ESC,VTXなら配線がピヨピヨ周りにあまりでないので、すっきりまとまるなぁ〜と思いました。
国産でFC,ESC,VTX,ピンコネクタセット系統図付きで安いやつがあればいいのに。
HGLRC FD413 自作ドローン テストフライトした感想

とりえず飛ばしてみた感想ですが、飛行時間は3s 300mAhのリポバッテリーで3分ぐらいのフライトですかね。
ガクガクしない滑らかな感じで飛んでくれます。
そこまでぶっ飛んだスピードはでないですね。
FCは4s対応と書いてあったので、今度4sでも飛ばしてみようと思います。
それといまいちポイントをあげるなら、カメラの映像がよくないですね。
DVR基盤があるわけではないので、FPVゴーグルに飛んできた映像を録画しているのですが、あまりいいものではありませんでした。
FHDのDVR機ばかり飛ばしているからそう感じるのかもしれませんけど。
ちなみにこちらが実際にフライトした時の動画です。
3回目のフライトの時の着陸の際にバウンドしてしまい、レシーバーがぶっ壊れてしまいました。
フレームの下にレシーバーを入れていたのが間違いでしたね。
よく考えればわかりそうなことだけど、、、自分のアホさかげんにげんなりです(_ _).。o○
動画2本目は4sで飛ばしているのですが、なかなか気持ちよく飛んでくれましたね。
バウンドしてレシーバー壊れたけど。
やはり、着陸するときはAIRモードからACROモードに切り替えた方がよさそうです。
AIRモード着陸はバウンドしますね。
パーツ構成
FC,ESC:HGLRC FD413
価格:$39.99
VTX:runcam tx200
購入時の価格:$12
レシーバー:Frsky XM+
価格:$13.99
モーター:iFlight BeeMotor 1104 4200
価格:13ドル×4
プロペラ:4 pairs Gemfan Hulkie 2040
価格:$3.19ドル
フレーム:iFlight TurboBee 120RS Plus(少し形状は違いますがほぼ一緒です)
価格:$23.99
まとめ
ドローンのパーツを購入して組みてると、いろいろ勉強になるのはいいんだけど、時間がかかるし、たいして安くはあがらない。
はんたいににすべて新品で購入したら、高くついてしまそうです(よく計算してないのでわからんけど)。
BNF機を買ってVTX交換するぐらいの方が楽でいいかもしれません。
ブレの少ない空撮をしたい人は、ジンバル付きかブラシレスマイクロドローン
ブレの少ない綺麗な空撮をしたい人はジンバル付きのドローンか、ブラシレスマイクロドローンがおすすめです。
ジンバル付きのおすすめのドローンは下の記事で紹介しています↓↓

LINKDJIの最新ドローン比較「Phantom、Mavic Pro(Air)、SPARK、Inspire(インスパイア)」 初心者にはどれがおすすめ?
200g未満ブラシレスマイクロドローン

FHD以上のブラシレスマイクロドローンなら、安定した飛行ができるのでブレの少ない綺麗な空撮をすることができます。
下の動画は200g未満のブラシレスマイクロドローンで空撮したものです。
そこそこブレのない空撮ができていいると思います。
※複数の機種、違うカメラで空撮しています。
ちなみにプロの方が200g未満ブラシレスマイクロドローンを使うとこのくらい綺麗な空撮をすることができます↓↓
上で紹介したようなFHDで撮影できる200g未満のブラシレスマイクロドローンは下の記事で紹介しています↓↓

ちなみに4k動画の撮影できるブラシレスマイクロドローンも発売されています。4kブラシレスマイクロドローンは下の記事で紹介しています↓↓

ブラシレスマイクロドローンは基本的にFPVゴーグルを装着して5.8Ghzの電波を使用して飛行するので、「アマチュア無線免許」または「第三級陸上特殊無線技士」の免許と、無線局の開局が必要になります。
詳しくは下の記事で紹介しています↓↓




