
今回は自作でドローンを作ってみたい方のために、実際に自分が3インチ機を組み立てた例をあげて紹介していきます。
関連記事
65mmサイズから5インチサイズまで、今まで作ってきたドローンの一覧は下の記事で紹介しています↓↓
>>自作ドローンの作り方!設計方法、パーツ選定を初心者向けに解説
※下の動画は最近作った自作ドローン↓↓↓2022年1月にビルドしたフリースタイル機です。古いパーツや、安物パーツなども使用していますが、普通に飛びます。パーツ構成はYoutubeの動画の概要欄に記載しています
上の動画のビルドしたドローンのサンプル動画はこちら↓
電子工作をやったことのない人でもなんとか組み立てはできます
自作ドローンは、電子工作をやったことのない人でも、なんとか組み立てはできます。
簡単にいえば、FC(フライトコントローラー)の回路図を見ながら、それどおりにパーツをハンダを使いならが組み立てていけばOKです。
自分は4台ほど組み立てましたが、今でもめっちゃハンダつけが下手くそです(
だけどドローンは普通に飛びます(笑)
記事執筆時は4台でしたが、今は合わせて10台以上は作っています。組み立てれば飛ぶような表現をしていますが、もちろん送信機の設定やベータフライトの設定は必要になります。
自作ドローンを作るのに必要なパーツの紹介
まず自作ドローンを作るにあたり必要なパーツを紹介しています。
サイズが大きくなっても基本的に必要なパーツは変わらないと思いますが、今回は3インチ機を組み立てた時のことを例にあげて紹介します。
フレームの選び方

まずはフレーム選びから。フレームのサイズによって、モーター、FC、ESC、FPVカメラなどのパーツも変わってきます。
200g未満のドローンを作りたいなら、3インチ以下のフレームを選ぶといいと思います。
フレームはいろいろ種類があって迷ってしまいますが、まず初めはBNF機をみて自分の作りたいドローンを参考にしながら選べばいいと思います。
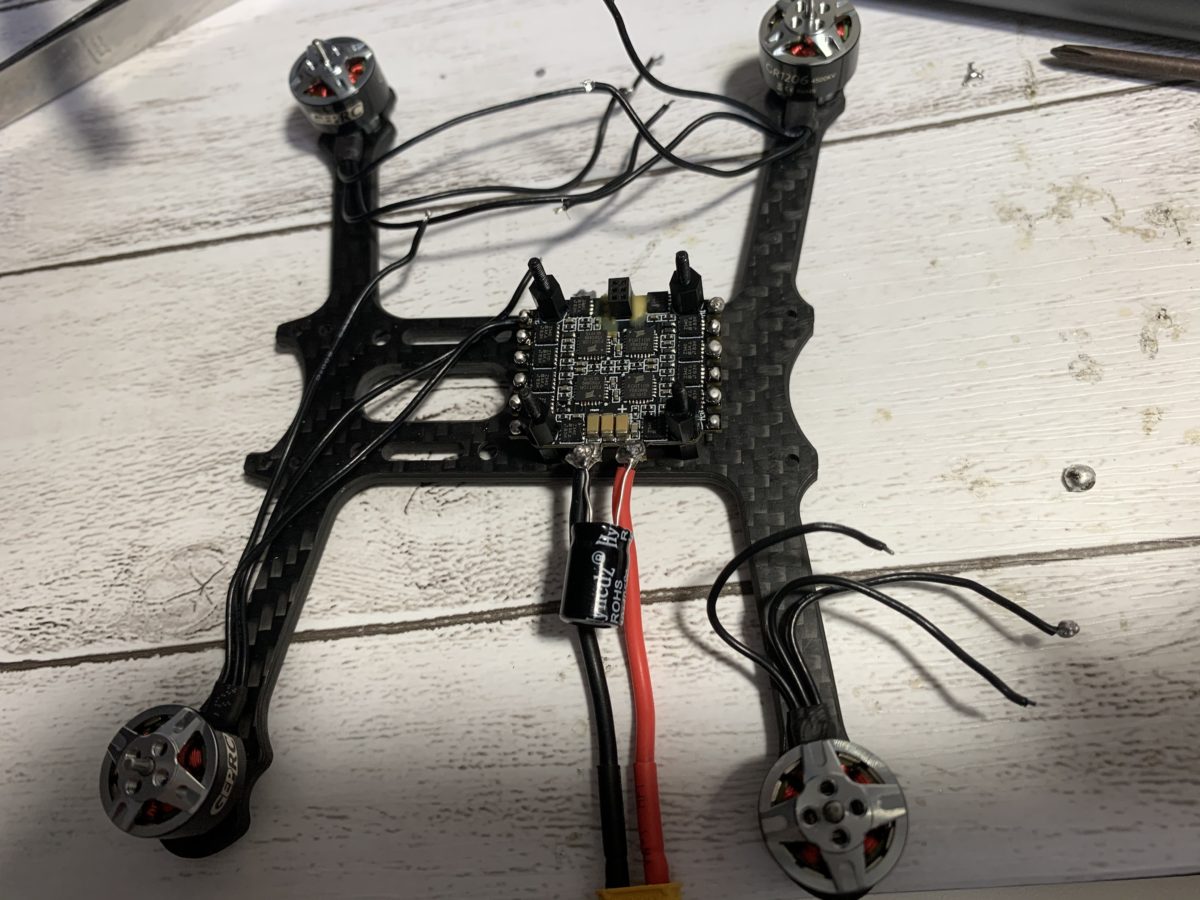
この記事では以前にフレームだけで紹介した「Geprc Cygnet CX3」を使って組み立てを紹介していきます。
「20mm×20mm」のタワーを2個つくれるので、カメラのDVR基盤を搭載するのも楽々です。

モーターの選び方

モーターのサイズは使用するフレームによってサイズを考えて選びます。
フレームの販売ページには、推奨しているモーターのサイズが記載されています。
それを目安にして購入するか、そのフレームを使用していいるBNFドローンに搭載されているものを参考にするといいと思います。
ちなみに今回の記事で使用する「Geprc Cygnet CX3」の推奨モーターは「1106/1107/1108/1205/1206」でした。
このフレームを使用して「Geprc」が販売しているBNF機には1206 4500kv値のものが搭載しています。
今回の記事ではそれと同じモーター「1206 4500kv値」のものを使用して組み立てています。
FC、ESCの選び方

FCによって対応しているバッテリーの電圧や、ネジ穴の径が違ってきます(何種類かしかないけど)。
「Geprc Cygnet CX3」フレームを使ったBNF機では「Geprc」のFC、ESC、VTX、全部ピンでつなげるタイプのものでしたが、VTXを開局済みのやつにとりかえることができません。
なので、FC,ESCはピンタイプだけど、VTXだけ配線で繋げられるFC,ESCのセット「Emax F3 Magnum」をこの記事では選んで使用しています。
とりあえず、今の自分の知識で言えることは
- FC、ESCに対応しているバッテリーの電圧を見ること
- FCを取り付けるネジ穴のサイズ「20mm×20mm」と「16mm×16mm」「30.5×30.5mm」とあるのでフレームにあったものを選ぶ
- 穴のサイズは同じでもESCのサイズがでかい場合がありフレームのスタンドオフなどに干渉する時もあるので気を付ける
- パーツ構成はBNF機を参考にして選ぶといちばんかんたん(だったらBNF機を買った方が早いという考え方もありますが...)
ちなみに「Emax F3 Magnum」はFCにはじめからブザーの取り付けがされている、おもしろいFCです。
ブザーを配線つけて後付けする必要がありません。
いまいちポイントたぶんスマートオーディオに対応していないところです。見た感じでは、配線をとりつける場所がありませんでした(たぶん)
※上で紹介しているブザー付きのFCとESCのセットはもう古いものになりますので、2020年6月現在では販売されていません。もちろんF3のFCで古いものなので、今更購入する必要はありません。
自分は「MAMBA F405 Mini MK2」下のFC、ESCのセットをよく利用しています↓最新のMAMBA F7もありますが、価格が少しあがります


ちなみにこのフレームで完成機で販売されているドローンについている「FC,ESC,VTX」は上の画像のやつです。
※2021年12月現在確認したところ、販売終了しています
今回利用しているフレームの場合、20mm × 20mm の基盤のタワーを2個つくれる構造になっているのですが、ESCのサイズによってはとなりの基盤にぶつかってしまう可能性があります。上で紹介した、FC、ESCで組んだことはないので、うまく組めるかは実践していません。
ネジ穴「16mm×16mm」のFC,ESCは下の記事でまとめています↓↓

【自作ドローンの作り方】レシーバーの選び方
今回の記事ではレシーバーを「Frsky XM+」を使用しています。
送信機の通信方式にあったレシーバーを選択すればいいと思います。

関連記事
送信機については下の記事でまとめています。最初は安いマルチプロトコルの送信機を購入するのがいいと思います。マルチプロトコル送信機なら、ほとんどのレシーバーとバインドさせることができます。↓↓
>>ドローン用 プロポの選び方とおすすめ品を紹介【FPVマイクロドローン送信機】
ちなみに2024年9月現在、自分はELRSの送信機とレシーバーは「Beta FPV」のELRSレシーバーをメインに使用しています。


VTXの選び方
自分の開局しているVTXを選んで組んでいけばOKです。
それとFCからの電圧だけには注意。
FCからの電源が7v以上の場合で5.5vまでのVTXをつけると煙が出てVTXが壊れます。
自分知らずに1回壊しました。いや2回かも(笑)
ちなみに5.5vまでの電圧でコスパがいいVTXは「Eachine NANO VTX」
小型で400mW出力ができるVTXです。
戸澤さんのところで系統図は入手できるし、価格も安いです。

※ちょっと良いVTXを選ぶならTBSとかRUSHあたりで3000円〜4000円くらいで購入できます
参考記事
戸澤さんについて詳しくは下の記事で紹介しています↓↓
>>【ドローンの開局申請】VTXの系統図は戸澤さんのところで入手できます
5インチのフリースタイル ドローンを作る場合は、7V~24Vまで対応の「TBS UNIFY PRO 5G8 HV (SMA)」あたりを自分はつかいます。
800mWまで出力できるので、そこそこ遠くまで飛ばせることが魅力的です
少し値段は高いですけどね。

その他にも、ドローンにおすすめのVTXはたくさんあるので、興味のある方は下の記事を読んでみてください↓

自分は気にいったVTXが見つかったら、何個かまとめて購入して開局しておきます。
新しくドローンを購入した時など、VTXだけ交換してすぐに飛ばすことができます。
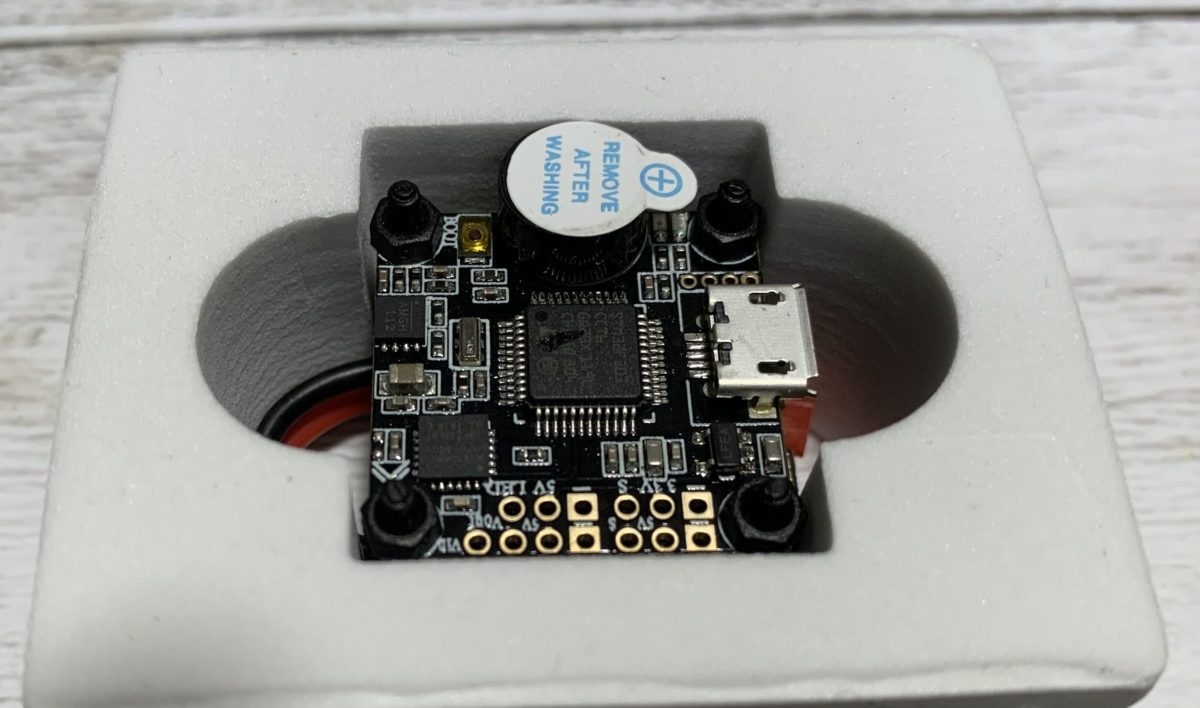
FPVカメラの選び方
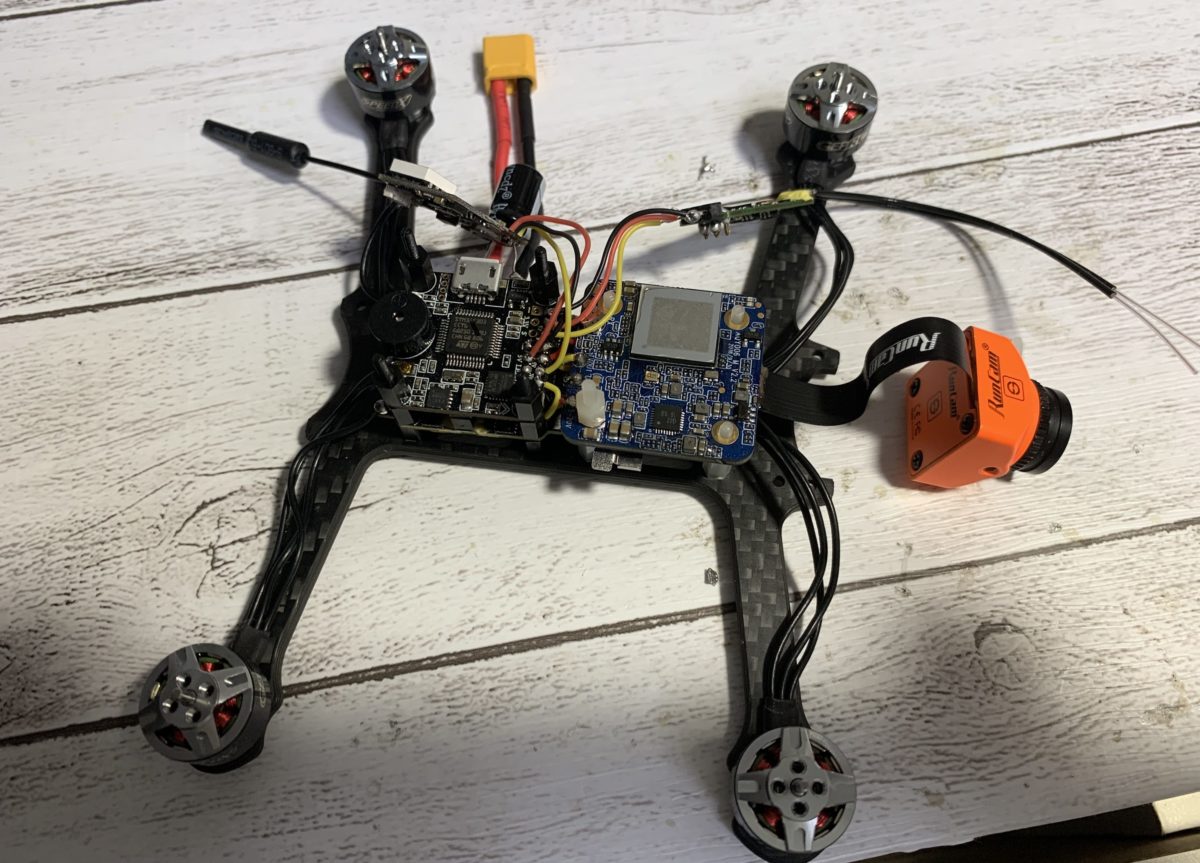
いろいろ種類のあるFPVカメラですが、今回組み立てに使用したカメラは「RunCam Split Mini 2」というカメラです。DVR基盤があり、マイクロSDにFHDで録画ができるFPVカメラです。
カメラのサイズの幅は3インチくらいまでのドローンは14mmか19mmのものを使用することが多いです。
今回のフレームのカメラマウントの幅は19mmのものだったので「RunCam Split Mini 2」の19mmを選びました。
2020年4月現在では「RunCam Split Mini 3」まででていて、14mmのnanoバージョンもあります。
GoProなどをドローン本体に乗せるなら、わざわざDVR基盤があるカメラを搭載しないでもOKだと思いますが、今回組み立てる機体はGOProを搭載する予定はないので自宅にあまっていた「RunCam Split Mini 2」を使用しました。

4Kで撮影できるカメラもあります。マイクロSDに残せる動画は綺麗ですが、FPVゴーグルに飛んでくる映像はあまりよくないのがイマイチポイント。基盤の穴は20mm × 20mmです。
詳しくは下の記事でも紹介しています↓↓

関連記事
2024年9月現在のFPVドローンの傾向をみていると、軽い重量のドローンで綺麗な空撮をしたい場合は、HDや4KのFPVカメラをのせるより、剥きプロを載せたり、Insta360系、DJI OSMO Action2など軽量カメラを載せるのが支流になってきています。
剥きプロに関しては、自分も実際に作ってみました。下の記事で紹介しています↓
>>GoPro HERO7を分解!剥きプロ GoPro liteを作ってみた
自作ドローンを作るのに必要なものや工具
はんだこて
自作ドローンを組み立てるには、ハンダつけが必須ですので「はんだこて」は最低限必要になります。
自分が使用しているハンダこては「白光FX600A」です。
値段は4000円くらいしますが、長く使えておすすめです。
温度が上がるのが早いのもおすすめポイントですね。

詳しくは下の記事でも紹介しています↓

以前はアマゾンで買った安いものを使用していたのですが、10回くらい使用したら壊れてしまい「白光FX600A」に変更しました。
ただアマゾンで売っているハンダコテセットは、いろいろなものがついてきて、意外と使えるものもたくさんあります。
なので、いちどアマゾンのセットやつを購入するのもありかもしれません。
はんだ
ハンダは必要になります。自分は100円ショップで売っているはんだを使用しています。
ハンダの良し悪しははっきり言って今の所よくわかっていません。
ネジ類
フレーム、FC、ESC、モーターなどには、付属品としてネジ類がついてきますが、それでは足りない場合が多いです。
タワーを作る時に必要になるネジセットなどを購入するのがおすすめです。
自分はbanggoodで下の2点を購入しました。


今回使用していたフレームやFCのネジのサイズはM2というものを使用していたので、これを選びました。
ほぼ自分がもっているドローンのネジ類は「M2」です。
ドライバー類

自分の使用しているドライバーは、上の画像のセット3種。
どれも価格が安くておすすめです。
星型のネジやいろいろな形のタイプのネジにつかえるセット↓↓

六角のナットをしめるにはこれがおすすめ↓↓

精密ドライバーは同じものはもう売っていませんでしたので、ベッセルの別のやつ↓↓
100円均一でも売っているけど、ベッセル好きなのでオススメしておきます。

【自作ドローンの作り方】3インチドローンの組み立て方法
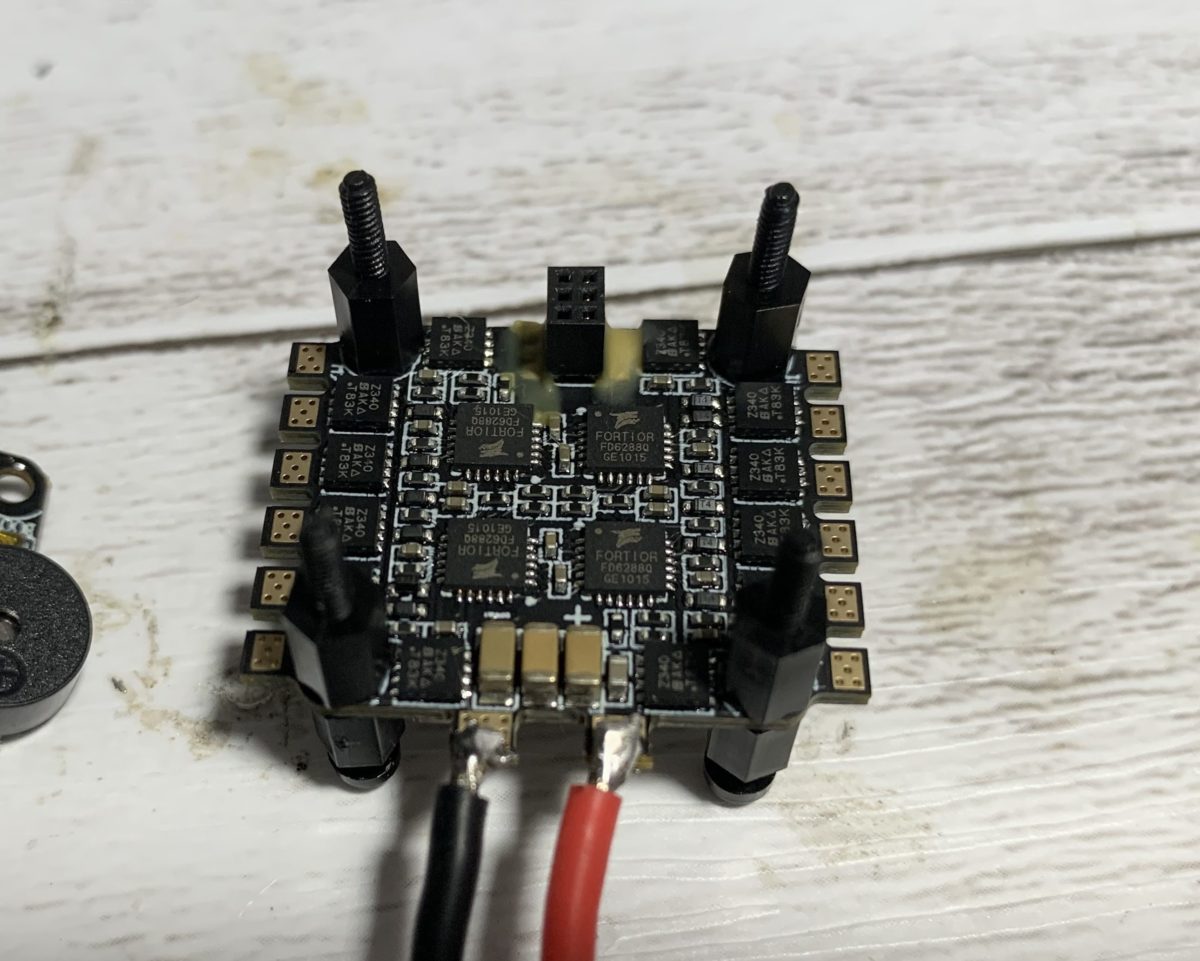
はじめにESCに電源ケーブルをとりつけていきます。
基本的にはプラスが赤、マイナスは黒ですので、間違えないように。

次にフレームにモーターをとりつけていきます。
フレームに表裏があるものもありますので、間違えないように。

次にモーターの配線を程よい長さにカットしていきます。
ESCをフレームに実際につけて、長さを合わせながらカットしていくといいと思います。
自分はかなりビビリですので、かなり長めにカットしています。
あとでフレームにタイラップなり、テープなりで止めることを考えて長さを決めていきましょう。
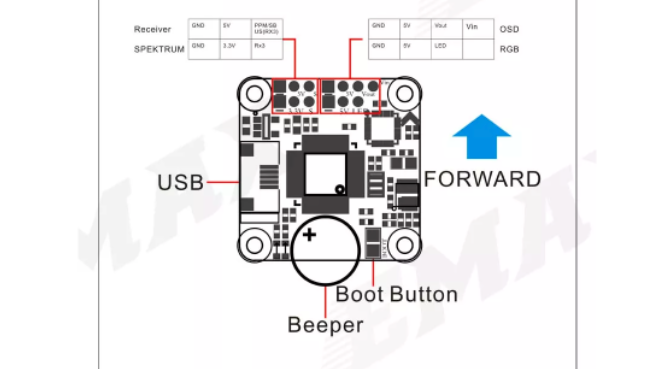
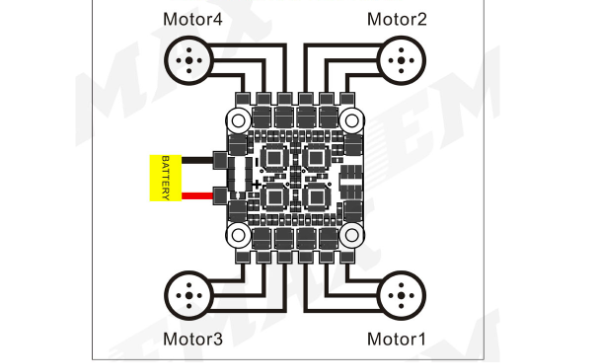
ちなみに今回購入したFC,ESCのセットの向きは上の画像のようになっています。
上のような回路図は購入すると説明書としてついてくる場合もありますし、説明書がついてこない場合もあります。
回路図については購入する前に、本体と一緒についてくるのか、ネットで探せばあるのか、調べておくことをおすすめします。
今回購入したFC,ESCのセットは説明書はなしで、ネットであったのものを記載しています。
以前に調べないで購入したら、ネットでも見つからなくて痛い目を見た経験があります。
FCやESCには向きがありますので、どちらが前方になるのか確認してから配線をカットしていくようにしてください。FCやESCの向きはベータフライトの設定で変更することができますので、絶対に守る必要はありませんが、とりあえず自分はデフォルトの向きで取り付けています。
FCから各パーツの取り付け
たぶん作る人やケースによって順序は変わってくると思いますが、今回はFCをフレームに取り付けていない状態で各種パーツをつけていきました。配線の長さなどは、取り付け位置を考えながらイメージして決めています。
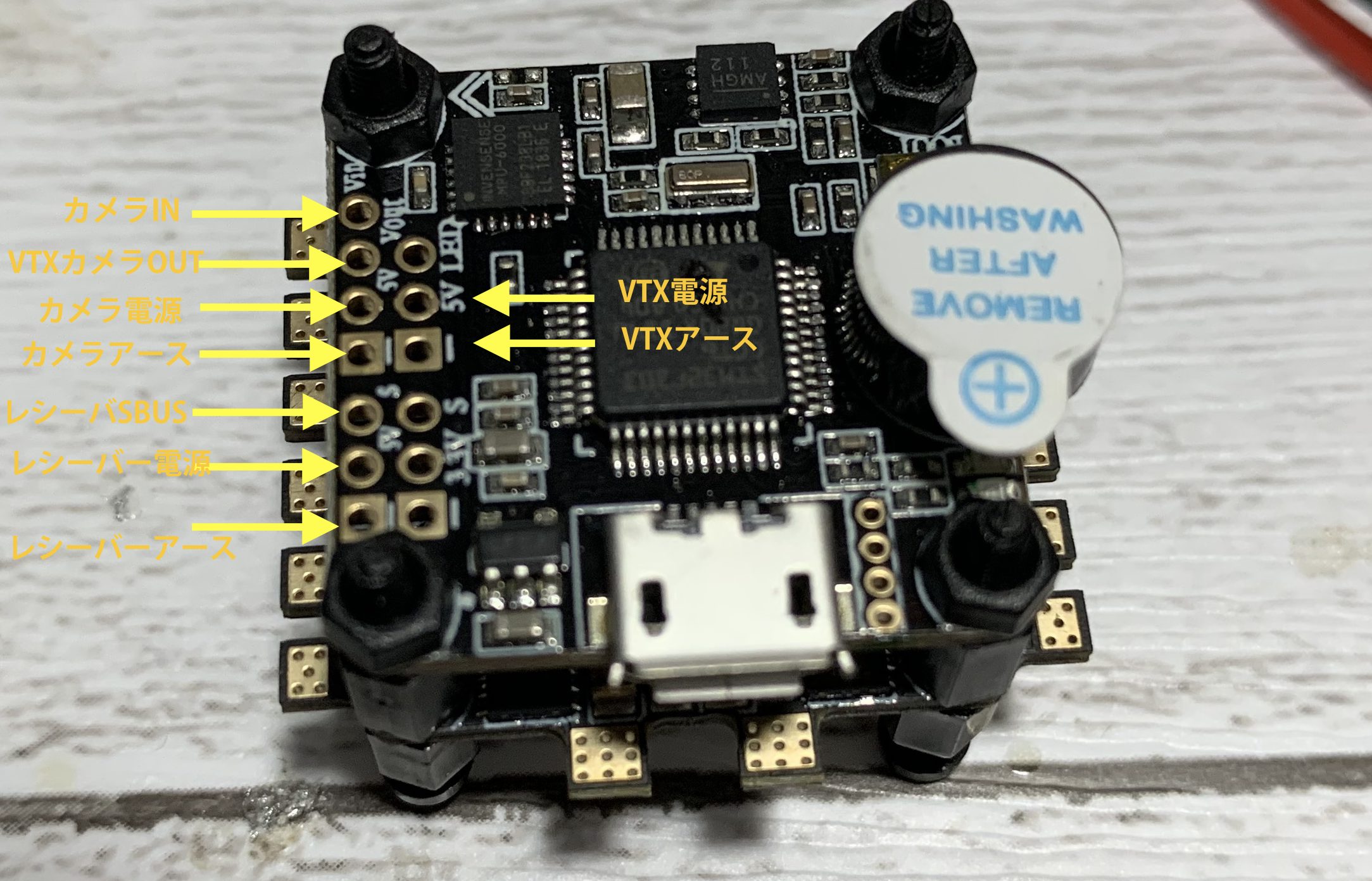
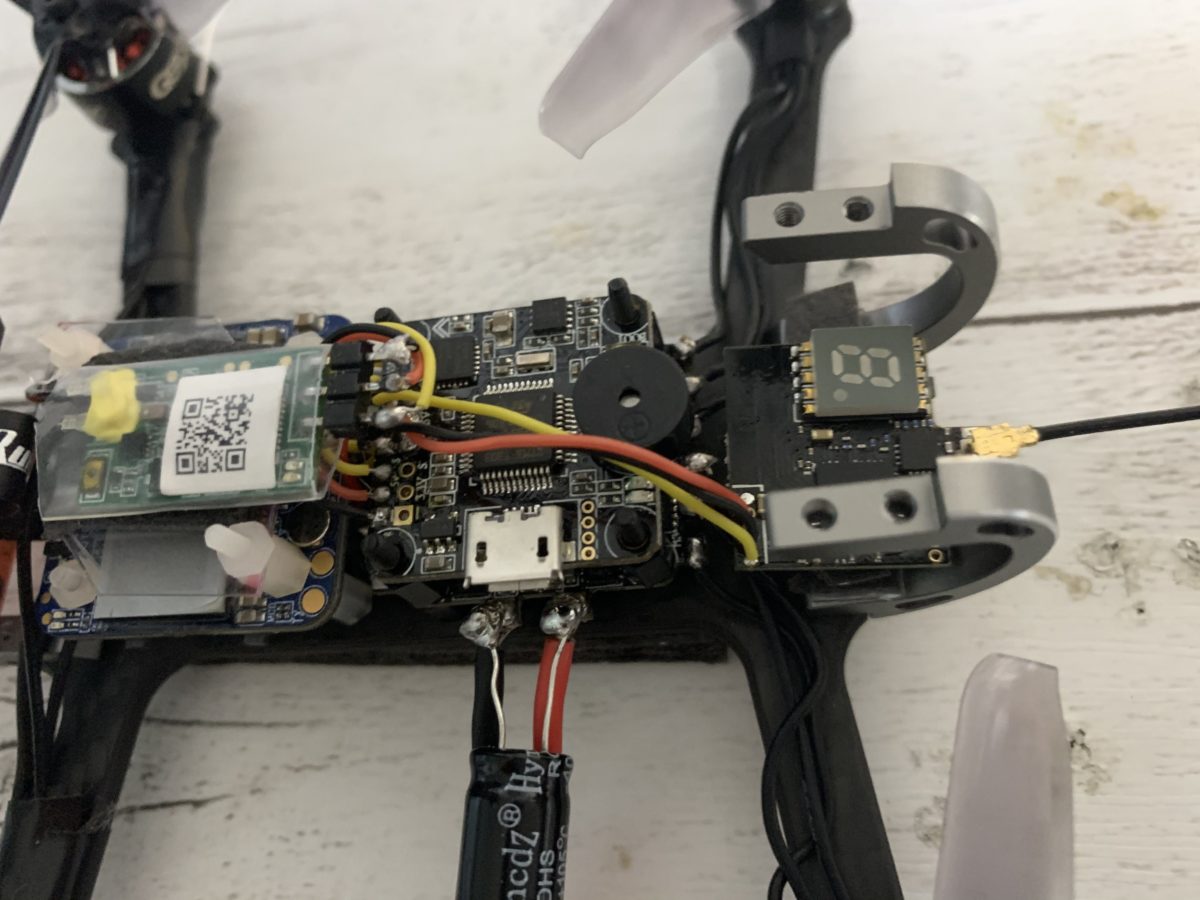
FCからの配線はこんな感じではんだつけしていきます。
FCにVTX、レシーバー、カメラのDVR基盤、をとりつけてから、下の画像のようにESCにFCを、ガチャコ〜ンってドッキングさせています。
人によっては、ESCとFCをつないだ状態で、VTX、レシーバー、カメラのDVR基盤、を取り付ける人もいるかもしれません。
作業のやりやすい方法でやればいいと思います。
いきなり画像が飛びますが、実際にはんだつけで、パーツを取り付けてみたところです。
作業に集中しすぎて、写真を撮り忘れてしまいました。
とりあえずパーツ類を組んだら動作のチェックをしてみましょう。
組み立てに慣れている人はチェックしないで、最後まで組んでしまうのかもしれませんが、初心者のうちはハンダつけした時点で動作のチェックをおすすめします。完全に組み終わってから動作をチェックして見たら動かない、、、、そんなこともありえますからね。
【自作ドローンの作り方】動作のチェック
あくまで順序は自己流ですので、もしかするとおすすめできない順序があるかもしれません。あくまで参考程度でお願いします。
それと送信機の設定はできている前提で話をすすめています。
BNFドローンの修理やバラシ、ブザーやレシーバーの取り付けなどは20台ちかくやりましたが、自作ドローンの組み立ては4台程度しかやったことがありません(2019年10月現在)。間違っている順序などあるかもしれません。
まずはバッテリーの電源を入れて、カメラの映像がVTXをとおしてFPVモニターに飛んでくるかチェックします。
とりあえずOKなら次に進みます。
送信機とレシーバーをバインド
次に送信機とレシーバーをバインドさせます。
今回使用したレシーバーは「Frsky XM+」。
レシーバーのバインドボタンを押しながらバッテリーを入れてバインド待ちにして、あとは送信機の方でバインドボタンを押せすとレシーバーが赤点滅します。
次にバッテリーを一度ぬいて、再度バッテリーを入れ、今度はLEDが緑色点灯に変わればバインドOKのサインです。
ベータフライトに接続

まずポート「UART3」のシリアル受信をONにします。
FCやレシバーをハンダで接続したポートによって変わってくると思います。あくまでこのFCの場合を例にあげています
画面右下に「保存」があるので忘れないように。
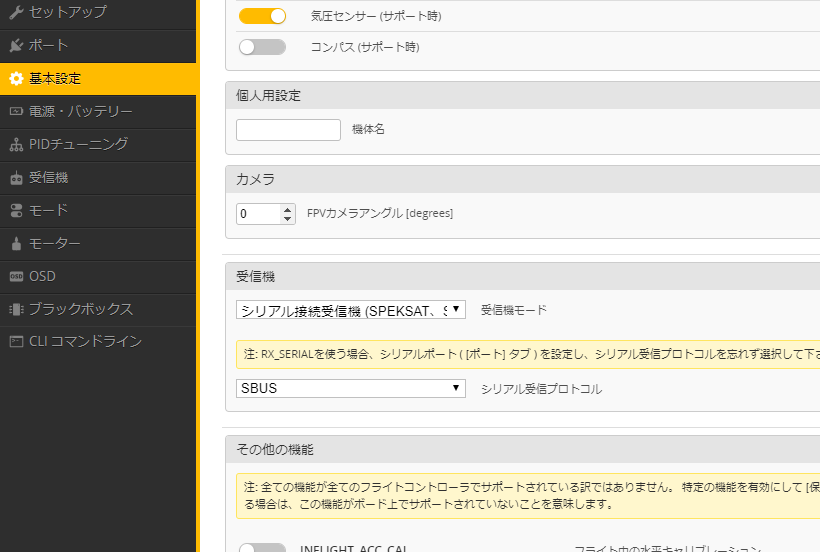
次に基本設定の受信機のところを、
「シリアル接続受信機」「SBUS」に変更。
最後に画面右下の「保存して再起動」をクリックして設定を保存します。
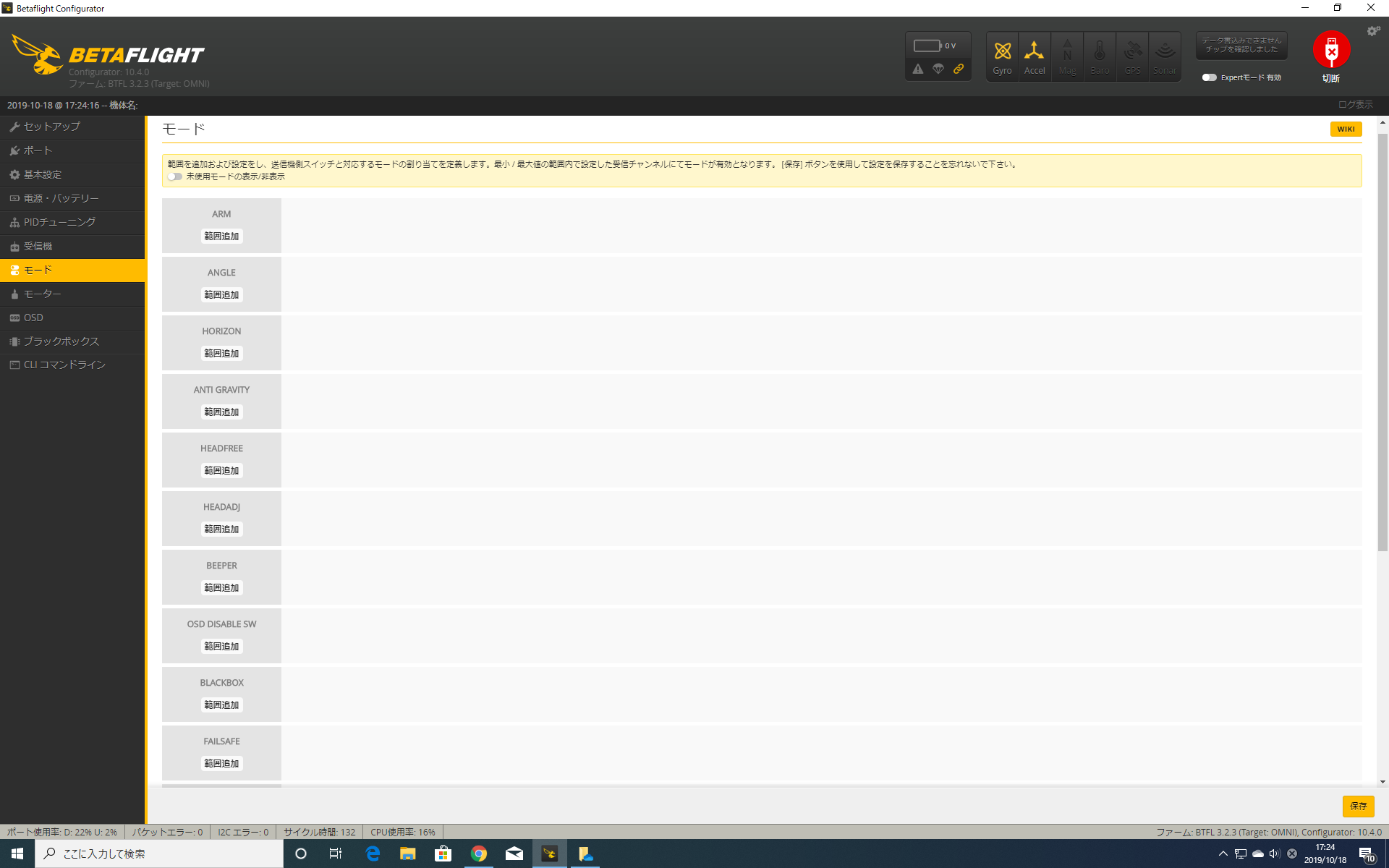
次にモードタブをクリックして、スイッチ類の割り当てをしていきます。
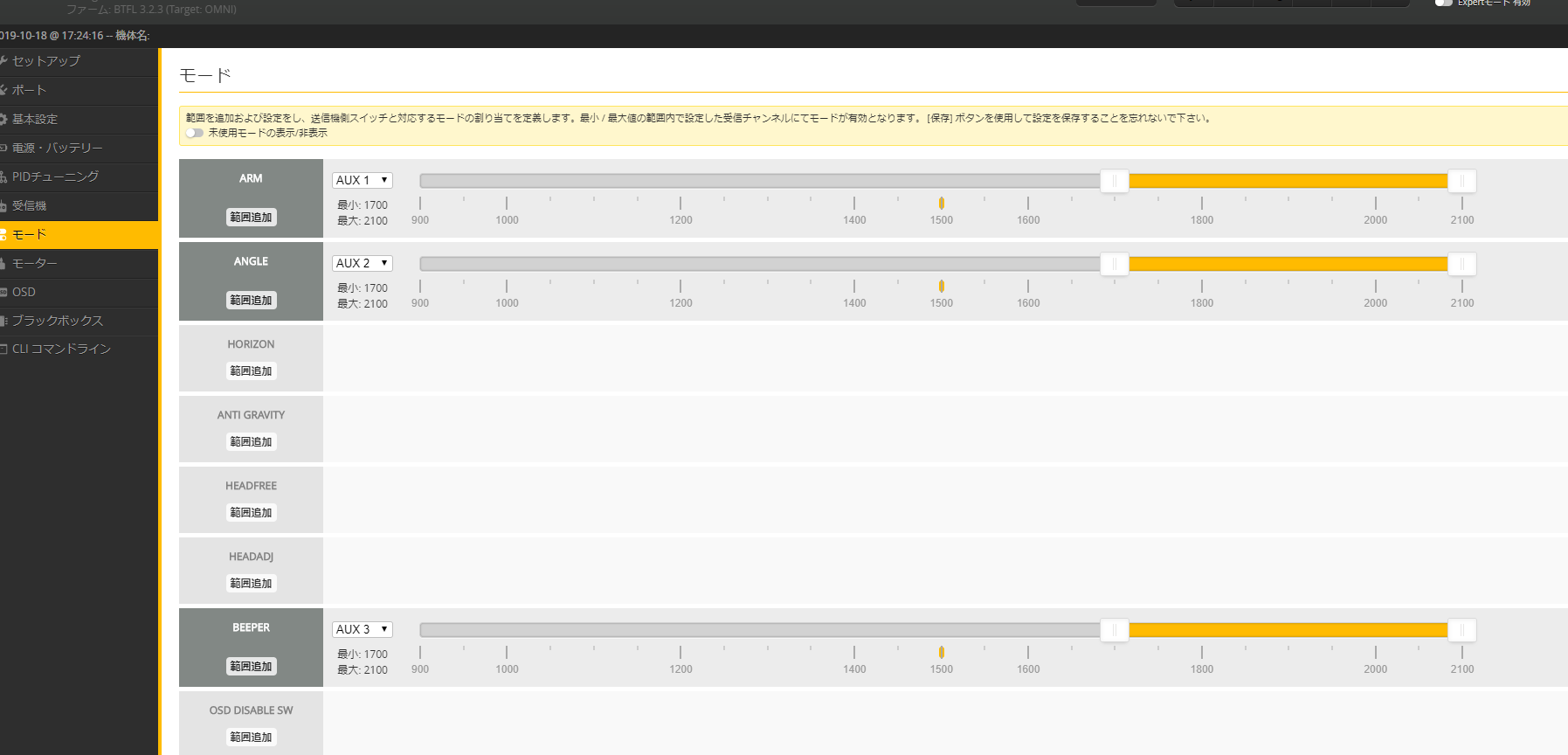
自分の設定はAUX1に「ARM」を割り当てて
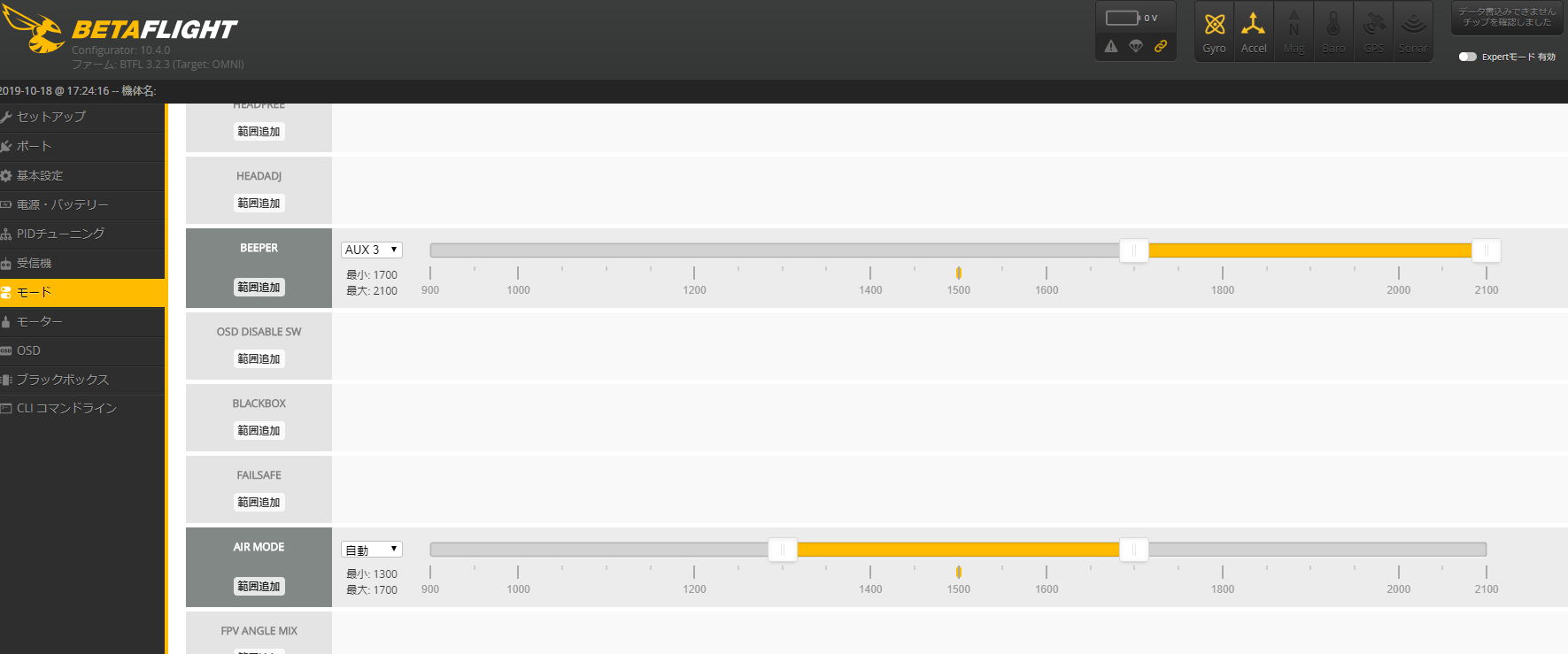
AUX2で「MODE」の切り替え(アングル、ホライゾン、アクロ)
AUX3でブザーがなる設定にしています。
これも右下の「保存」をすることを忘れずに。
※2019年当時の記事で「ホライゾン」を入れていますが、今はアングル、エアー、アクロモードでスイッチを切り替えるようにいれています。ちなみに自分は外で飛ばす場合はAIRモードしか使わないです
モーターの回転方向のチェック
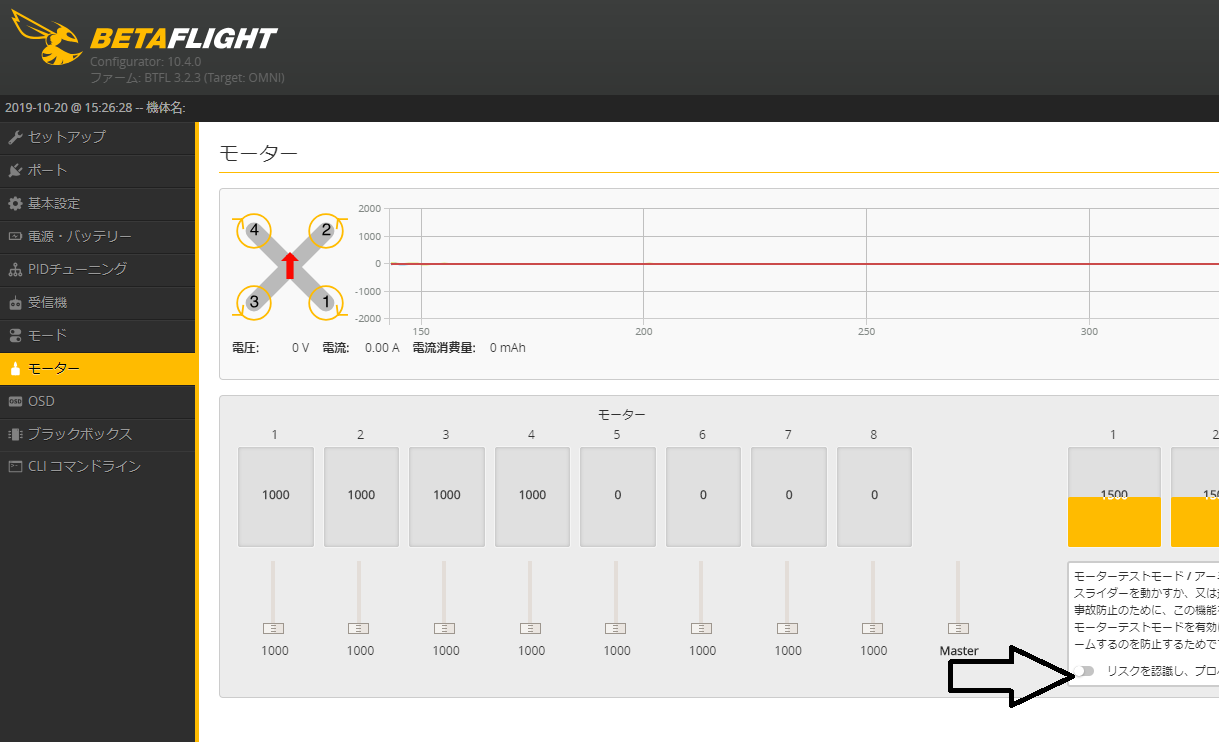
次にモーターの回転方向をチェックします。
ベータフライトのモータータブ「リスクを理解して、、、、、」のチェックを入れて、モーター1〜4まで1個ずつゲージを上げてモーターの回転方向が、画面に出ている回転方向と一致しているか確認します。
バッテリーはつないでいないと、モーターは回らないのでドローンとバッテリーをつないだ状態でチェックします。
今まで4台自作でドローンを作りましたが、全部2個だけモーターが逆回転でした。
当たり前ですがモーターの回転方向が逆だとドローンは普通に飛ばずに暴れます(笑)
モーターの回転方向を変える方法
モーターの回転方向は「blheli configurator」を使って逆回転にすることが可能です。
blheli configuratorのアプリをインストールして、ドローンとUSBで接続。
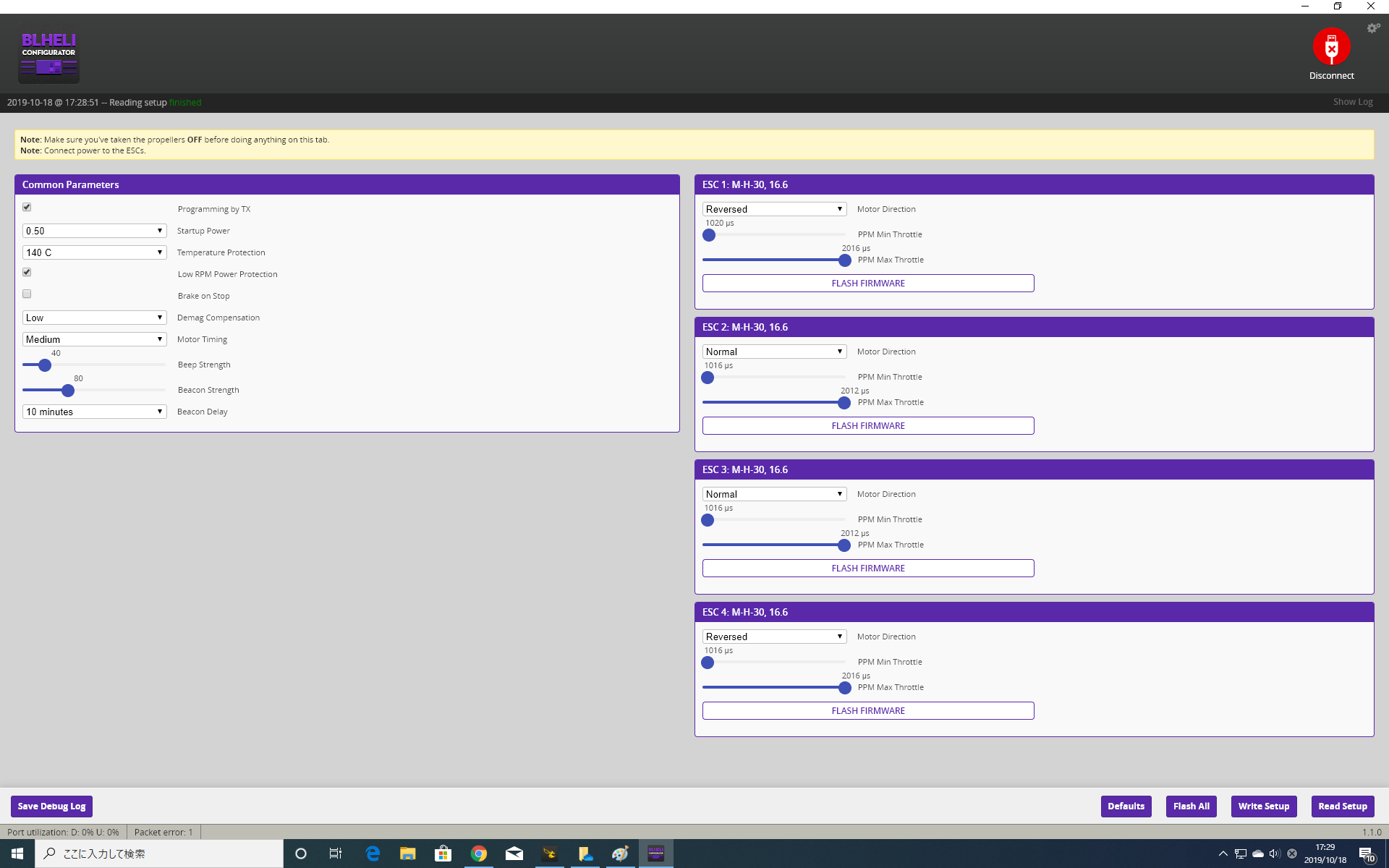
今回は1番と4番のモーターの回転方向が逆回転だったので、「blheli configurator」で「reverse」をかけてあげました。
最後に「wrlte setup」をクリックしてあげればモーターの回転が逆になります。
OSDの設定
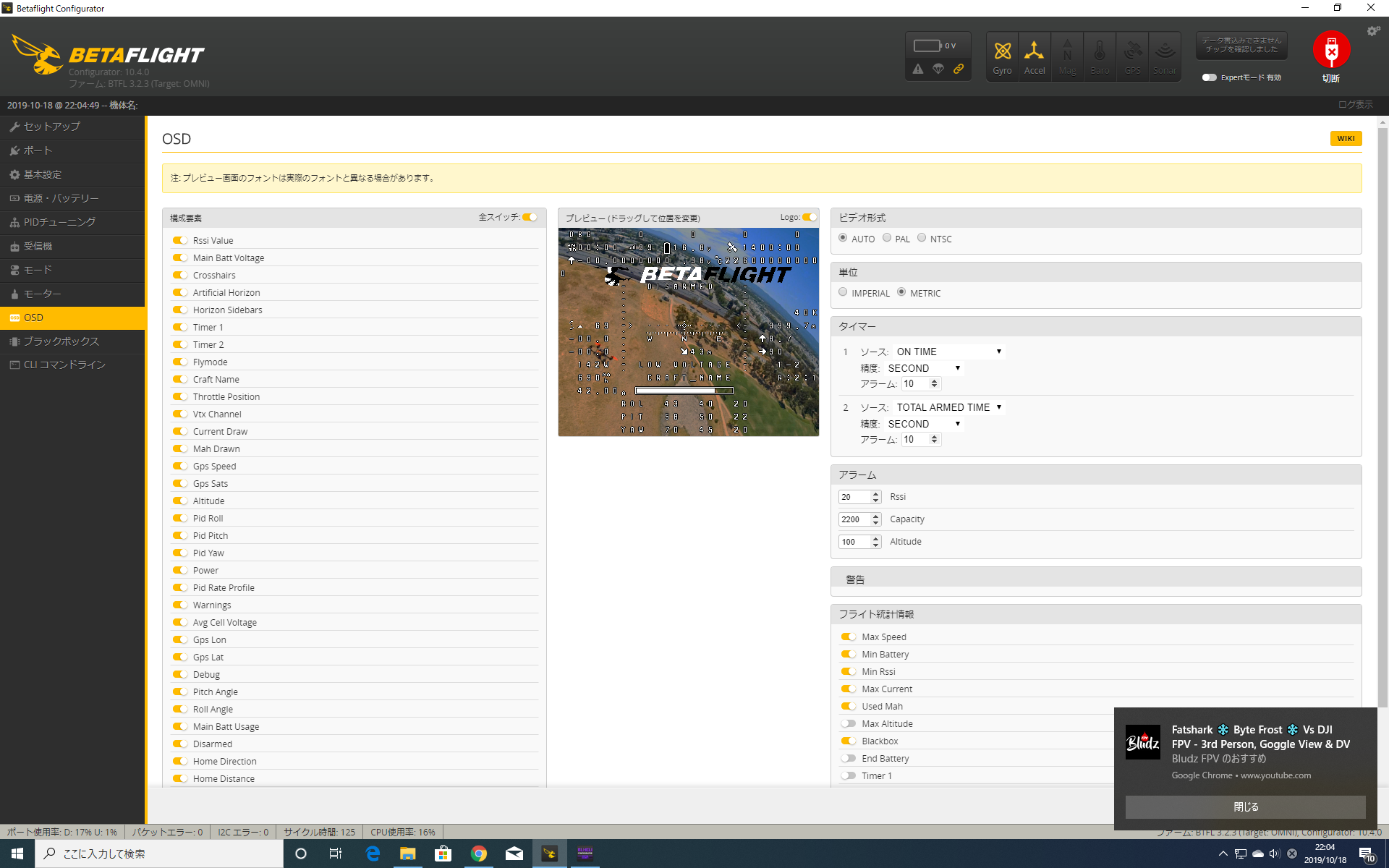
今回購入したFCの場合OSDの表示がすべてONになっていたので、いったん全部OFFにして、それから適当に自分が必要な項目だけONにしていきました。これも人によってそれぞれですので、お好みで設定すればいいと思います。
OSDの表示とはFPVゴーグルに表示される、機体の情報のことをいっています。
例)
・フライト時間
・バッテリー残量
・ベータフライトで設定した機体名
・送信機と機体の電波状況(RSSI)
など。いろいろな表示をさせることが可能です。
ただいろいろな情報を表示させてしまうと、画面がごちゃごちゃになってしまい、操縦しずらいというデメリットもあります。
自作ドローンのプロポ(送信機)の選び方

自作ドローンを作ってもプロポがなくては飛ばすことができません。
自作ドローンのプロポの選びかたは、ドローンにつけるレシーバーによって変わってきます。
例をあげるなら。
レシーバーの選択を「Frsky XM+」にするなら→Frskyのプロトコルに対応している送信機
レシーバーの選択を「FUTABA R2000SBM」にするなら→FUTABAのプロトコル「S-FHSS」
現在ドローンを飛ばしている方のレシーバーをみているとプロトコルは「Frsky」または「FUTABAのS-FHSS」がおおいです。
送信機はいろいろなレシーバーとバインドできるマルチプロトコルのもの、またはFUTABAを使っている方が多いです。
最後に
ちなみに完成した機体はこんな感じです。

重量は117gくらいでしした。
今回は自作ドローンの作り方の流れを簡単に説明しましたが、あと何台か作ってみて理解が深まったら、まとめ記事でも作ろうと思います。
それと作ってみた機体はまだ室内でのホバリングテストくらいしかやっていないので、気持ちいい飛びをするかはわかりません。
来週あたりに飛ばしてみます。
HD自作ドローン 実際に飛ばしてみた!youtube動画
まずはバッテリーは「GNB 3s650mAh」飛ばしてみました(上の動画)。
すごく軽くていい感じに飛びます!!。
バッテリー限界まで消費させれば5分くらいはいけそう。
※2019年9月に飛ばしてきた時の動画です
PIDの設定をいじってみました

スロットルを急激にあげたりすると「ガクガクブルブル」する現象をなおすためにPIDの設定をいじってみました。
飛行している場所に、パソコンを持ち込んで少しずつ値をいじりながら調整するという、かなり面倒なやり方で。
ちなみにPIDの設定に関しては、下の書籍を読んで参考にしてみました。


ちなみにデフォルトの設定は上のとおり。
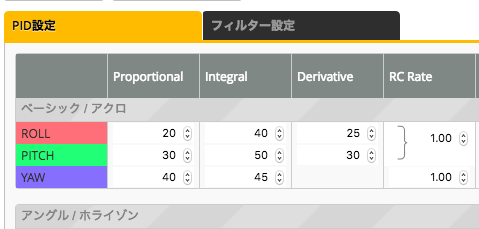
これを4回くらい変更して飛ばしてを繰り返し最終的に上の値に変更。
こちらの動画は最終的に変更した値で飛ばした時のものです。
GNB 4s 520mAh 冒頭
GNB 3s 650mAh 1:36秒あたりから
スロットルを一気にあげすぎると、まだ少しブルブルはしますが、だいぶ改善されたと思います(あまり動画だとわからんけど)
パーツ選びが難しい人は自作ドローンキットがおすすめ
FCやESC、VTXなどのパーツ選びが難しいという方は「自作ドローンキット」を購入して一度組み立ててみるといいと思います。
ドローンの仕組みを知るのにちょうどいいと思います。
自作ドローンキット URUAV UZ80

「URUAV UZ80」は実際に組み立てたことのある自作ドローンキットです。ハンダつけも必要ないのでとても簡単です。





TSSの場合のVTXの追加の申請は何台でも価格は同じなのでそうしてます。